Autonomous, Vision Based Satellite Proximity Operations for Inspection, Health Monitoring and Surveillance in Orbit
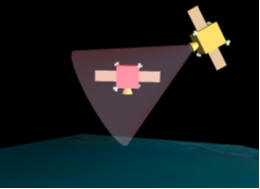
The USAF has identified spacecraft proximity operations as one of the key technologies for maintaining superiority in space. Proximity Operations (ProxOps) will enable, for instance, routine servicing, inspection and refueling of satellites. Most importantly, ProxOps are indispensable for the protection of friendly space assets against an adversary, or for monitoring an adversary’s space assets, especially in a geosynchronous orbit (GEO). At nearly 25,000 miles high, objects in GEO are too small for detailed observation via optics or radar. A small service satellite deployed in the proximity of a target satellite can provide accurate information of the satellite’s structural health or (if the target is unknown) identify and categorize the target satellite.
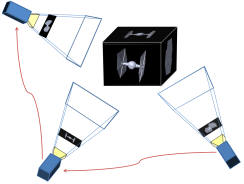
This research project aims at developing, testing and implementing the necessary theories and algorithms for inspection, classification and tracking of a moving (e.g., “tumbling”) target in space, when no a priori information about the target satellite is assumed. Tracking here refers to the simultaneous estimation of both the target’s six-dimensional pose and three-dimensional shape. This is a problem that is widely known in the ground robotics field as SLAM (Simultaneous Localization and Mapping) and SfM (Structure from Motion). However, traditional SLAM/SfM algorithms developed for ground robots need to be modified in order to address the environmental challenges in space (illumination conditions, absence of background inertial feature points), as well as spacecraft onboard restrictions (limited power and computational resources). No prior information about the target satellite here means that we assume no reliable pre-existing information on the shape, mass properties (inertia matrix, center of mass) or appearance of the target satellite, and no pre-existing recognizable reference markers that can assist during the approach and docking phases with the target, contrary to what the majority of current Autonomous Rendezvous and Docking (ARD) and ProxOps technologies and algorithms assume. In other words, our emphasis will be on rendezvous, proximity operations (and perhaps docking) with non-cooperative satellites.
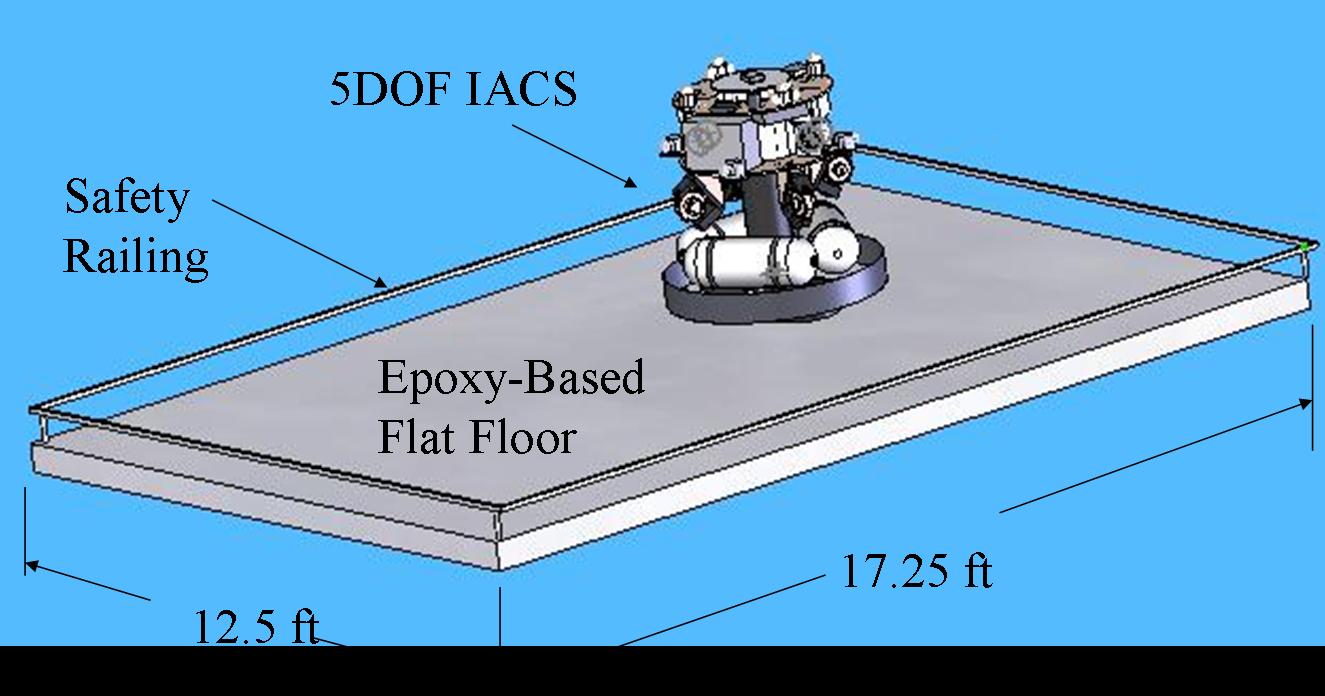
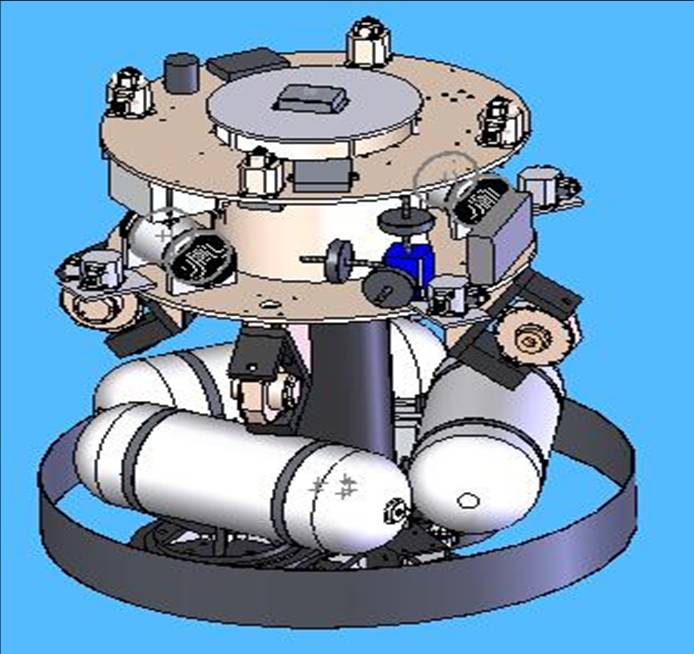
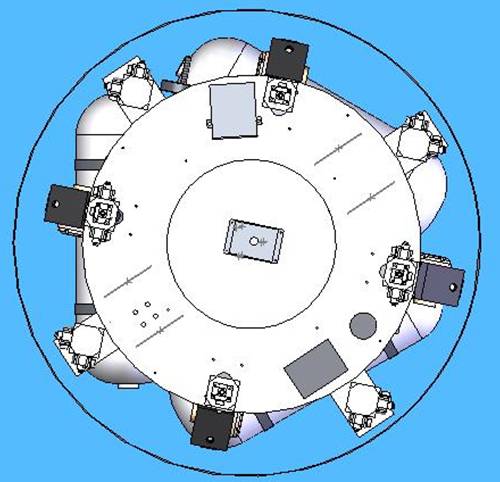
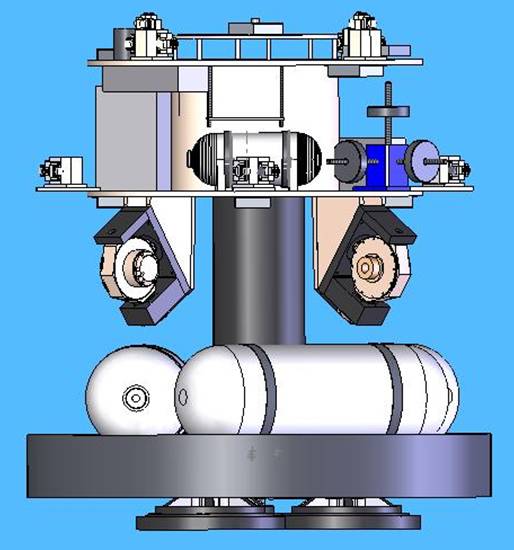
Experimental validation will use the existing 5-DOF Autonomous Spacecraft Testing for Robotics Operations in Space (ASTROS) facility at the School of Aerospace Engineering at the Georgia Institute of Technology. This will allow the support of experiments in the area of vision-based autonomous rendezvous and docking for servicing and refueling of spacecraft. The current facility at Georgia Tech consists of a hemi-spherical air bearing, and can support experiments for attitude control of spacecraft with three rotational degrees of freedom: +-30 deg about the x and y axes (horizontal) and +-360 deg about the z axis (vertical). Four Variable Speed Control Moment Gyros (VSCMGs) and eight dry nitrogen thrusters are used as actuators. The sensor suite consists of a three-axis rate gyro, a two-axis sun sensor, and a three-axis magnetometer. Translational motion of the platform will be possible via the addition of a linear air bearing, allowing the whole platform to float on a thin cushion of compressed air. After the completion of the planned modifications, the Georgia Tech ARD facility will be able to support realistic experiments for validating algorithms for on-orbit proximity operations, including novel autonomous rendezvous and docking (ARD) scenarios. Autonomous proximity operations, including the capability for timely, on-demand, on-orbit servicing and refueling of space assets, are deemed as an enabling factor advancing the current civilian and military capabilities in terms of information gathering, space asset upgrading and maintenance.
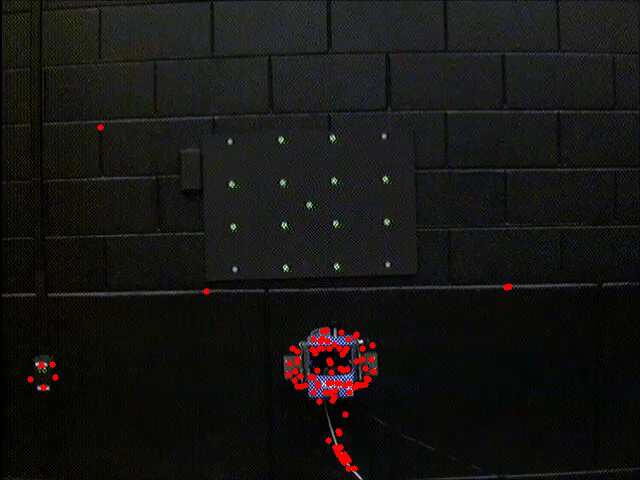
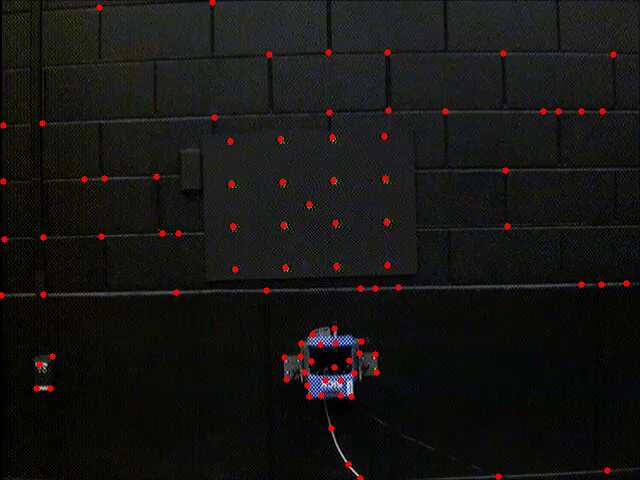
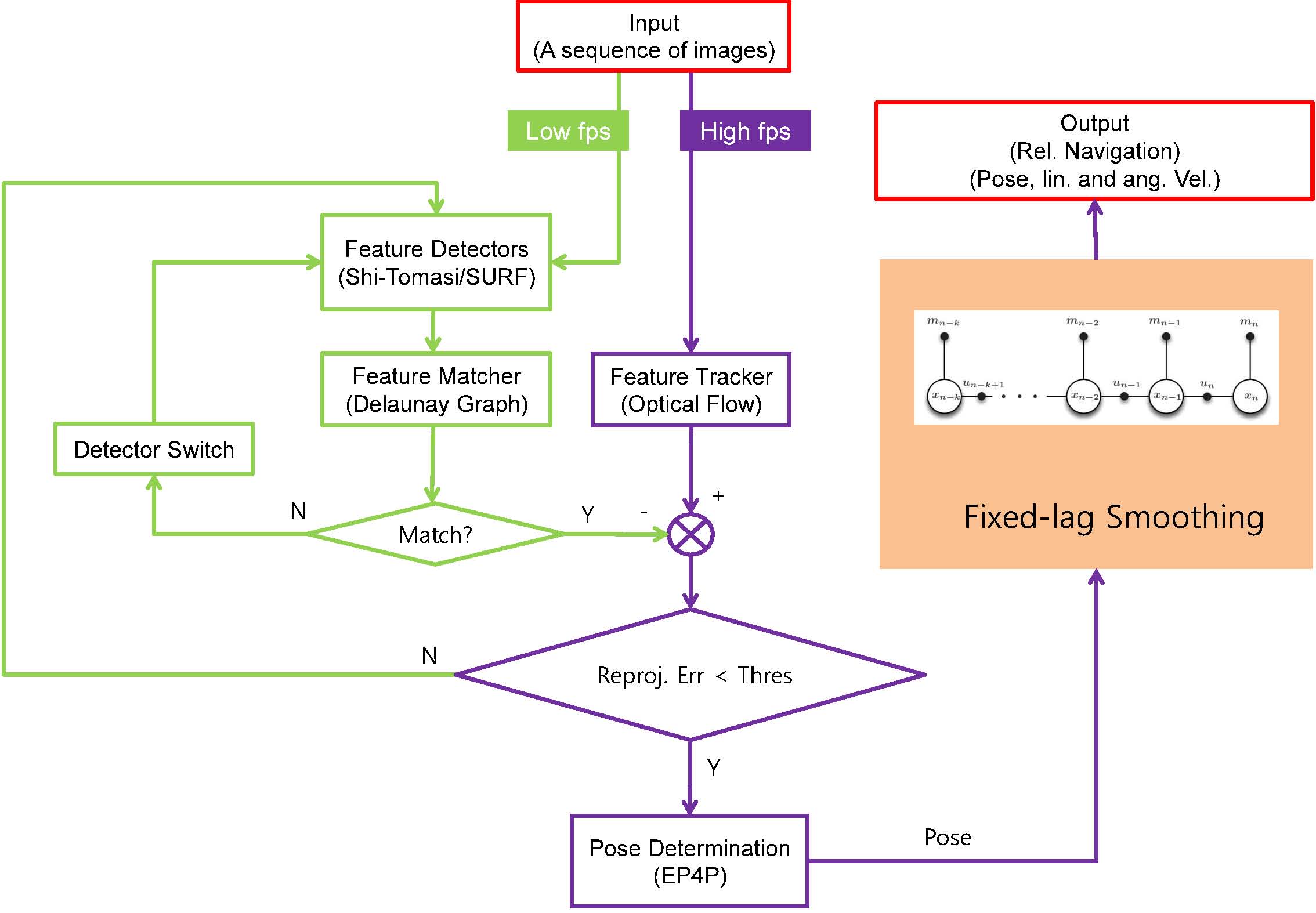
Feature Tracking: For feature detection we use two different feature detectors, namely, the Shi-Tomasi corner detector, and the rotation and scale invariant SURF (Speeded Up Robust Features) blob detector, depending on the imaged fiducial marker scale change along the distance to the target. We also use a point pattern matching technique based on a Delaunay triangulation for target re-acquisition in order to provide fault-tolerant and automated relative navigation capability. For bundle adjustment we use a fixed-lag smoothing SLAM algorithm based on a probabilistic graph model to obtain optimized pose, linear and angular velocity estimates with high accuracy. The SLAM algorithm we use is based on GTSAM, a factor graph-based smoothing (as opposed to a filtering) estimation method developed at Georgia Tech by Frank Dellaert's group. GTSAM provides better accuracy and robustness, compared to other SLAM algorithms and comes with real-time execution guarantees by exploiting the sparsity of the ensuing graph.
The overall schematic used for processing the on-board video images to get pose estimation is shown below.
Dual Quaternions for Coordinated Relative Attitude and Position Navigation and Guidance: We have developed control laws for tracking the attitude and position of a target satellite using dual quaternions. Dual quaternions are an extension of classical quaternions and in addition to the insight they provide to derive the controller, they also allow to write the controller in a compact form. Owing to their numerous advantages in providing a "natural'' representation of the combined translational and rotational kinematics, dual quaternions have been successfully applied to inertial navigation, control of rigid body kinematics and dynamics, inverse kinematic analysis, computer vision, and animation. Dual quaternions are actually closely related to Chasles theorem, which states that the general displacement of a rigid body can be represented by a rotation about an axis (called the screw axis) and a translation along that axis, creating a screw-like motion. Compared to other representations of this screw-like motion, such as dual orthogonal 3-by-3 matrices, dual special unitary 2-by-2 matrices, and dual Pauli spin matrices, dual quaternions have been found to be the most efficient representation to perform basic pose transformations in terms of storage requirements and number of operations. Under the same metrics, dual quaternions have also been found to be more efficient than 4-by-4 homogeneous matrix transformations and Rodriguez parameters/translation vector pairs for solving the direct kinematic problem in robotics. They automatically take into account the natural coupling between the rotational and translational motions. We have developed velocity-free controllers (controllers that do not need angular or linear velocity information) and adaptive controllers (controllers that do not need knowledge of the mass or the moment of inertial of the satellite) using this formalism.
The animation below shows a rendezvous and docking maneuver between two satellites in orbit. All orbital perturbations are taken into consideration in this high-fidelity simulation. The simulation is sped-up halfway to simulate a whole orbit.
Experimental results from the dual-quaternion controller and the dual quaternion multiplicative EKF (DQ-MEKF) are shown below.
Closed-loop vision stabilization using VSCMGs
Sponsors
This project is supported by AFRL.
Selected Publications
- Cho, D., Jung, D. and Tsiotras, P., "A 5-dof Experimental Platform for Spacecraft Rendezvous and Docking,'' Infotech at Aerospace Conference, Seattle, WA, April 6-9, 2009, AIAA Paper 2009-1869.
- Cho, D.-M., Tsiotras, P., and Holzinger, M., "Robust Feature Detection, Acquisition and Tracking for Relative Navigation in Space with a Known Target,'' AIAA Guidance, Navigation, and Control Conference, Boston, MA, August 19-22, 2013.
- Tsiotras, P., "A 5dof Experimental Platform for Research in Spacecraft Proximity Operations,'' AAS Guidance and Control Conference, Breckenridge, CO, Jan. 31-Feb. 5, 2014, AAS Paper 2014-114.
- Filipe, N., and Tsiotras, P., "Rigid Body Motion Tracking Without Linear and Angular Velocity Feedback Using Dual Quaternions,'' European Control Conference, Zurich, Switzerland, July 17-19, 2013.
- Filipe, N., and Tsiotras, P., "Adaptive Model-Independent Tracking of Rigid Body Position and Attitude Motion with Mass and Inertia Matrix Identification using Dual Quaternions,'' AIAA Guidance, Navigation, and Control Conference, Boston, MA, August 19-22, 2013.
- Filipe, N., and Tsiotras, P., "Adaptive Position and Attitude Tracking Controller for Satellite Proximity Operations using Dual Quaternions,'' Astrodynamics Specialist Conference, Hilton Head, SC, August 11-15, 2013.
- Nuno, F., and Tsiotras, P., "Simultaneous Position and Attitude Control Without Linear and Angular Velocity Feedback Using Dual Quaternions,'' American Control Conference, Washington, DC, June 17-19, 2013.
- Filipe, N., and Tsiotras, P., "Adaptive Position and Attitude Tracking Controller for Satellite Proximity Operations using Dual Quaternions,'' AIAA Journal of Guidance, Control, and Dynamics, doi: 10.2514/1.G000054.
- Zhang, G., Vela, P., Tsiotras, P., and Cho, D.-M., "Efficient Closed-Loop Detection and Pose Estimation for Vision-Only Relative Localization in Space with a Cooperative Target,'' AIAA Space and Astronautics Forum and Exposition, San Diego, CA, August 4-7, 2014, AIAA Paper 2014-4262, doi:10.2514/6.2014-4262
- Filipe, N., Holzinger, M. J., and Tsiotras, P., "Pose-Tracking Controller for Satellites with Time-Varying Inertia,'' AIAA Space and Astronautics Forum and Exposition, San Diego, CA, August 4-7, 2014, AIAA Paper 2014-4455, doi:10.2514/6.2014-4455
- Valverde, A., Filipe, N., Kontitsis, M. and Tsiotras, P.,
"Experimental Validation of an Inertia-Free Controller and a
Multiplicative EKF for Pose Tracking and Estimation Based on Dual
Quaternions,'' 38th AAS Guidance and Control Conference,
Breckenridge, CO, Jan. 30-Feb. 4, 2014, AAS Paper 2015-017.

- Zhang, G., Kontitsis, M., Filipe, N., Tsiotras, P., and Vela, P., "Cooperative Relative Navigation for Space Rendezvous and Proximity Operations Using Controlled Active Vision,'' Journal of Field Robotics, (to appear).
- Filipe, N., and Tsiotras, P., "Adaptive
Position and Attitude Tracking Controller for Satellite Proximity
Operations using Dual Quaternions,'' AIAA Journal of Guidance,
Control, and Dynamics, doi:
10.2514/1.G000054.
- Filipe, N., Kontitsis, M. and Tsiotras, P., "An Extended Kalman
Filter for Spacecraft Pose Estimation Using Dual Quaternions,''
American Control Conference, Chicago, IL, July 1-3, 2015, pp.
3187-3192, doi: 10.1109/ACC.2015.7171823
- Zhang, G., Kontitsis, M., Filipe, N., Tsiotras, P., and Vela, P., "Cooperative
Relative Navigation for Space Rendezvous and Proximity Operations Using
Controlled Active Vision,'' Journal of Field Robotics, (to
appear).
- Filipe, N., Kontitsis, M., and Tsiotras, P., "Multiplicative
Extended Kalman Filter for Spacecraft Pose
Estimation Using Dual Quaternions,'' AIAA Journal of Guidance, Control, and Dynamics, (to appear). - Filipe, N., Valverde, A., and Tsiotras, P., "Pose-Tracking
Without Linear and Angular Velocity Feedback Using Dual Quaternions,''
IEEE Transactions on Aerospace and Electronic Systems, (to
appear).
- Kontitis, M., Tsiotras, P. and Theodorou, E., "An
Information-Theoretic Active Localization Approach during Relative
Circumnavigation in Orbit,'' AIAA Guidance, Navigation, and
Control Conference, San Diego, CA, January 4-8, 2016.