
Adaptive Intelligence for Cyber-Physical Automotive Active Safety - System Design and Evaluation
Current advances in MEMS sensor technology, the emergence of embedded control software, the rapid progress in computer technology, digital image processing, machine learning and control algorithms, along with an ever increasing investment in vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) technologies, are about to revolutionize the way we use vehicles and commute in everyday life. Automotive active safety systems, in particular, have been used with enormous success in the past 50 years and have helped keep traffic accidents in check. Still, more than 30,000 deaths and 2,000,000 injuries occur each year in the US alone, and many more worldwide. The impact of traffic accidents on the economy is estimated to be as high as $300B/yr in the US alone. Further improvement in terms of driving safety (and comfort) necessitates that the next generation of active safety systems are more proactive (as opposed to reactive) and can comprehend and interpret driver intent. Future active safety systems will have to account for the diversity of drivers’ skills, the behavior of drivers in traffic, and the overall traffic conditions.
This research aims at improving the current
capabilities of automotive active safety control systems (ASCS) by
taking into account the interactions between the driver, the
vehicle, the ASCS and the environment. Beyond solving a fundamental
problem in automotive industry, this research will have
ramifications in other cyber-physical domains, where humans manually
control vehicles or equipment including: flying, operation of heavy
machinery, mining, tele-robotics, and robotic medicine. Making
autonomous/automated systems that feel and behave “naturally” to
human operators is not always easy. As these systems
and machines participate more in everyday interactions with humans,
the need to make them operate in a predictable manner is more urgent
than ever.
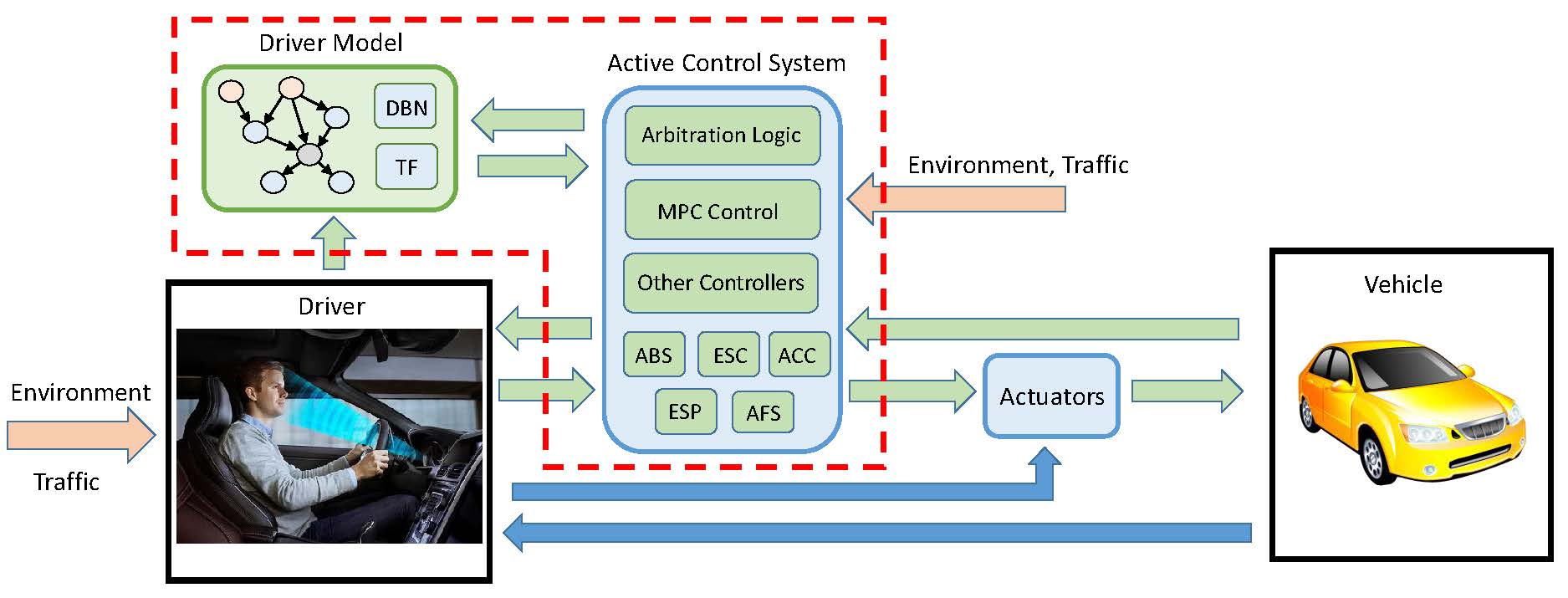
To achieve the goals of the proposed research,
we will use the estimation of the driver’s cognitive state to adapt
the ASCS accordingly, in order to achieve a seamless operation with
the driver. Specifically, we will use new methodologies to infer
long-term and short-term behavior of drivers via the use of Bayesian
networks and neuromorphic algorithms to estimate the driver’s skills
and current state of attention from eye movement data, together with
dynamic motion cues obtained from steering and pedal inputs. We will
inject this information into the ASCS operation in order to enhance
its performance by taking advantage of recent results from the
theory of adaptive and real-time, model-predictive optimal control.
The correct level of autonomy and workload distribution between the
driver and ASCS will ensure that no conflicts arise between the
driver and the control system, and the safety and passenger comfort
are not compromised. A comprehensive plan is proposed to test and
validate the developed theory by collecting measurements from
several human subjects while operating a virtual reality-driving
simulator.
The project is in collaboration with Karen Feigh and Laurent Itti (USC). Please visit Prof. Feigh's and Prof. Itti's websites for additional publications related to this project.
Please also visit our VIP project website.
Sponsors
This project is supported by NSF.
Selected Publications
- You, C., and Tsiotras, P., "Optimal Two-Point Visual Driver
Model and Controller Development for Driver-Assist Systems for
Semi-Autonomous Vehicles,'' American Control Conference,
Boston, MA, July 6-8, 2016.
- You, C., Lu, J., and Tsiotras, P., "Driver Parameter Estimation Using Joint E-/UKF and Dual E-/UKF Under Nonlinear State Inequality Constraints,"
IEEE Conference on Systems, Man and Cybernetics, Budapest, Hungary, Oct. 9-12, 2016.
- Okamoto, K., and Tsiotras, P., "A New Hybrid Sensorimotor Driver Model with Model Predictive Control," IEEE Conference on Systems, Man and Cybernetics, Budapest, Hungary, Oct. 9-12, 2016.
- You, C., Lu, J., and Tsiotras, P., "Driver
Parameter Estimation Using Joint E-/UKF and Dual E-/UKF Under Nonlinear
State Inequality Constraints,'' IEEE Conference on Systems, Man
and Cybernetics, Budapest, Hungary, Oct. 9-12, 2016.

- Okamoto, K., and Tsiotras, P., "A New
Hybrid Sensorimotor Driver Model with Model Predictive Control,''
IEEE Conference on Systems, Man and Cybernetics, Budapest, Hungary, Oct. 9-12, 2016, (best student paper finalist). - You, C., and Tsiotras, P., "Vehicle
Modeling and Parameter Estimation Using Adaptive Limited Memory
Joint-State UKF,'' American Control Conference, Seattle,
WA, May 24-26, 2017, pp. 322-327, doi:
10.23919/ACC.2017.7962973
- You, C., and Tsiotras, P., "Real-Time Trail-Braking Maneuver Generation for Off-Road Vehicle Racing," American Control Conference, Milwaukee, WI, June 27--29, 2018, pp. 4751– 4756, doi: 10.23919/ACC.2018.8431620
- You, C., and Tsiotras, P., "Off-Road High-Speed Cornering for Autonomous Rally Racing," IEEE Transactions on Control Systems Technology, Vol. 26, No. 2, pp. 485-501, 2021, doi: 10.1109/TCST.2019.2950354
- You, C., Lu, J., Filev, D., and Tsiotras, P., "Autonomous Planning and Control for Intelligent Vehicles in Traffic," IEEE Transactions on Intelligent Transportation Systems, Vol. 21, No. 6, pp. 2339-2349, June 2020, doi: 10.1109/TITS.2019.2918071
- Okamoto, K., and Tsiotras, P., “Data-Driven
Human Driver Lateral Control Models for Developing Haptic-Shared Control
Advanced Driver Assist Systems,” Robotics and Autonomous Systems,
(accepted January 2019). doi:
10.1016/j.robot.2019.01.020
- You, C., Lu, J., Filev, D., and Tsiotras, P., “Advanced Planning for Autonomous Vehicles Using Reinforcement Learning and Deep Inverse Reinforcement Learning,” Robotics and Autonomous Systems,
Vol. 114, pp. 1-18, April~2019, doi:10.1016/j.robot.2019.01.003
.