
Multiresolution Path Planning for Autonomous Agents
The current practice in control system
design is to develop the control algorithm, without giving any
specific thought
to the available hardware required for its implementation. Finding
the suitable control hardware to implement the algorithm is an
after-the-fact task. For many problems involving embedded
control hardware with limited computational resources (both in
terms of available CPU and memory) this traditional way of doing
things may not be possible. This research aims at reversing this
line of thinking and introduce a new paradigm, such that the
operational limitations of the hardware become part of the control
algorithm design specifications.
As a particular instance of this
transformative control design philosophy, the ubiquitous problem of
vehicle navigation
in a natural environment full of obstacles will be used. A new
multi-resolution algorithm is being proposed to efficiently encode
all possible paths inside this environment. The main idea used is
the fact that paths have lower dimensionality than the ambient space
they lie in, and hence, a more efficient encoding of the problem
data than standard 2D and 3D cell decompositions should be possible.
As a result, the search space is considerably reduced. The main
mathematical tool used is wavelets and beamlets, whose unique
properties capture directionality, in addition to scale and
locality. The adoption of beamlets enables for numerically more
efficient algorithms than previous cell decomposition-only based
path planning approaches. As an added benefit of the approach, the
typically uncoupled geometric and dynamic planner layers in the
motion planning hierarchy can now be naturally coordinated by
passing information about the allowable dynamic envelope of the
vehicle to the geometric layer. This ensures that the paths computed
by the geometric layer will indeed be rendered dynamically feasible.
Wavelet Cell Decompositions for Path Planning
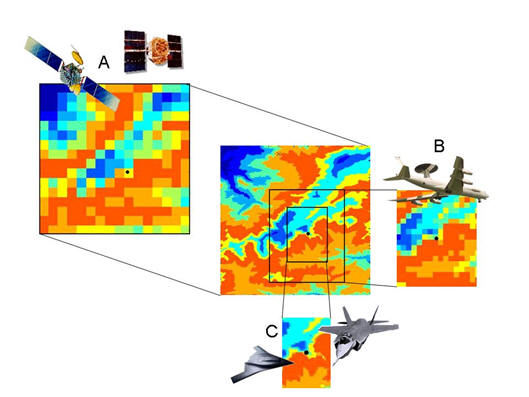
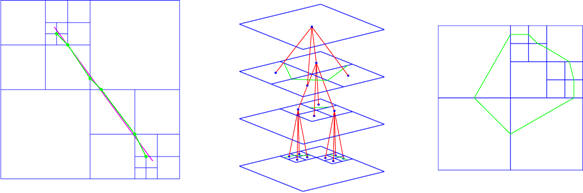
We propose a computationally efficient, hierarchical path-planning algorithm for autonomous agents (e.g., UAVs) navigating in a partially known environment W using an adaptive, discrete, cell-based approximation of W. The innovation of our approach hinges on using wavelets and beamlets to encode the district levels of fidelity (resolution) of W at different distances from the agent's current position. The motivation for this approach is simple: first, the agent's immediate reaction to an obstacle or a threat is needed only at the vicinity of its current position. Faraway obstacles or threats do not (or should not) have a large effect on the vehicle's immediate motion. Therefore, it is not prudent from a computational point of view to find a solution with great accuracy over large distances or over a long time horizon. The most accurate and reliable information of the environment is required (or it is even available) only at the vicinity of the vehicle. In that sense, the proposed algorithm can be classified under the category of "agent-centered'' search algorithm. Pictorially, such a multiresolution decomposition of the environment (say, an elevation map in this case) can be visualized as shown in the figure below.
 In
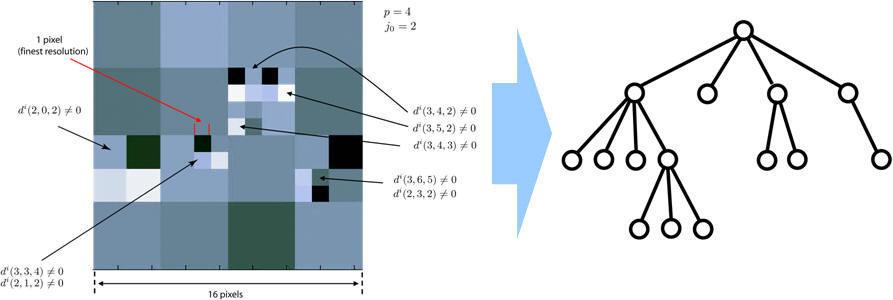
a departure from these quadtree-based methods, in this work we make
use of the wavelet transform to perform the required multiresolution
decompositions of the environment. This has several advantages.
First, the wavelet transform provides a very fast decomposition
of a function at different levels of resolution (the
computational complexity of the wavelet transform is of order
O(n)where n is the input data. This is even better than the FFT
which has complexity of order O(n log_2 n). Since the range and
resolution levels can be chosen by the user, the proposed algorithm
results in search graphs of known prior complexity. The algorithm is
therefore scalable, and can be tailored to the available
computational resources of the agent. Second, the use of wavelet
transform has the added benefit of allowing the construction of the
associated cell connectivity relationships directly from the wavelet
coefficients, thus eliminating the need for quadtrees. Finally, the
use of wavelet transform provides flexibility in terms of the choice
of the wavelet basis functions, which can help in reducing the
complexity of the resulting abstraction (i.e., topological search
graph) of the environment.
In
a departure from these quadtree-based methods, in this work we make
use of the wavelet transform to perform the required multiresolution
decompositions of the environment. This has several advantages.
First, the wavelet transform provides a very fast decomposition
of a function at different levels of resolution (the
computational complexity of the wavelet transform is of order
O(n)where n is the input data. This is even better than the FFT
which has complexity of order O(n log_2 n). Since the range and
resolution levels can be chosen by the user, the proposed algorithm
results in search graphs of known prior complexity. The algorithm is
therefore scalable, and can be tailored to the available
computational resources of the agent. Second, the use of wavelet
transform has the added benefit of allowing the construction of the
associated cell connectivity relationships directly from the wavelet
coefficients, thus eliminating the need for quadtrees. Finally, the
use of wavelet transform provides flexibility in terms of the choice
of the wavelet basis functions, which can help in reducing the
complexity of the resulting abstraction (i.e., topological search
graph) of the environment.
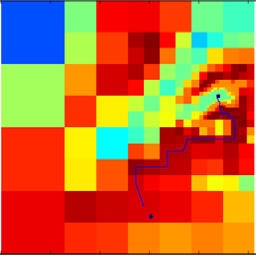
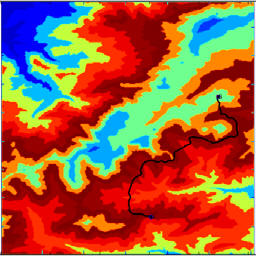
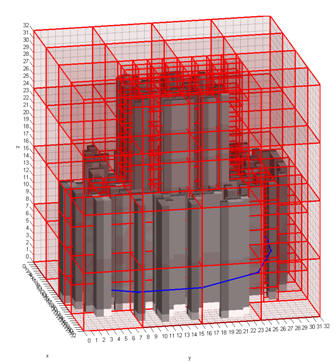
Below is an example of multiresolution path-planning.
From Wavelets to Beamlets
Wavelets induce a multiresolution hierarchy over a wide range of locations and scales. However, they exhibit a small, fixed number of preferred orientations (horizontal, vertical, diagonal), and are better described as roughly isotropic. A given path in 2D (or its approximation by a chain of line segments) has distinct, local bias towards certain orientations. Beamlets provide a framework for multiscale analysis similar to that of wavelets, in which line segments play a role analogous to the role played by points in wavelet analysis. They add two crucial elements missing from wavelet processing, however: orientation and elongation information. Beamlets are proven to achieve optimal asymptotic performance in detection problems. For instance, they have been used to design an efficient coding method for images made of curves. Beamlets are numerically more efficient than traditional curve processing algorithms, because they use the multiscale structure among them in an innovative manner.
m-A* Algorithm
We propose an innovative beamlet-based graph structure for path planning that utilizes multiscale information of the environment. This information is collected via a bottom-up fusion algorithm. This new graph structure goes beyond "nearest-neighbor'' connectivity, incorporating "long-distance'' interactions between the nodes of the graph. Based on this new graph structure, we obtain a multiscale version of A*, which is advantageous when preprocessing is allowable and feasible. Compared to the benchmark A* algorithm, the use of multiscale information leads to an improvement in terms of computational complexity.
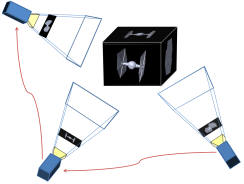
Multi-Agent Multi-Scale Path Planning
Although complete knowledge of the environment is necessary to plan an optimal solution for given task, the information about the world in which a planning agent is to plan is rarely entirely known. More likely, the agent has only a glimpse of the world abstracted away from the current state and time. This idea has led many researchers to wonder how to abstract the search space in an efficient and meaningful way. Since the early days of AI, a hierarchical abstraction of a transition system has been recognized as a crucial tool for planning in complex environments and long decision horizons.
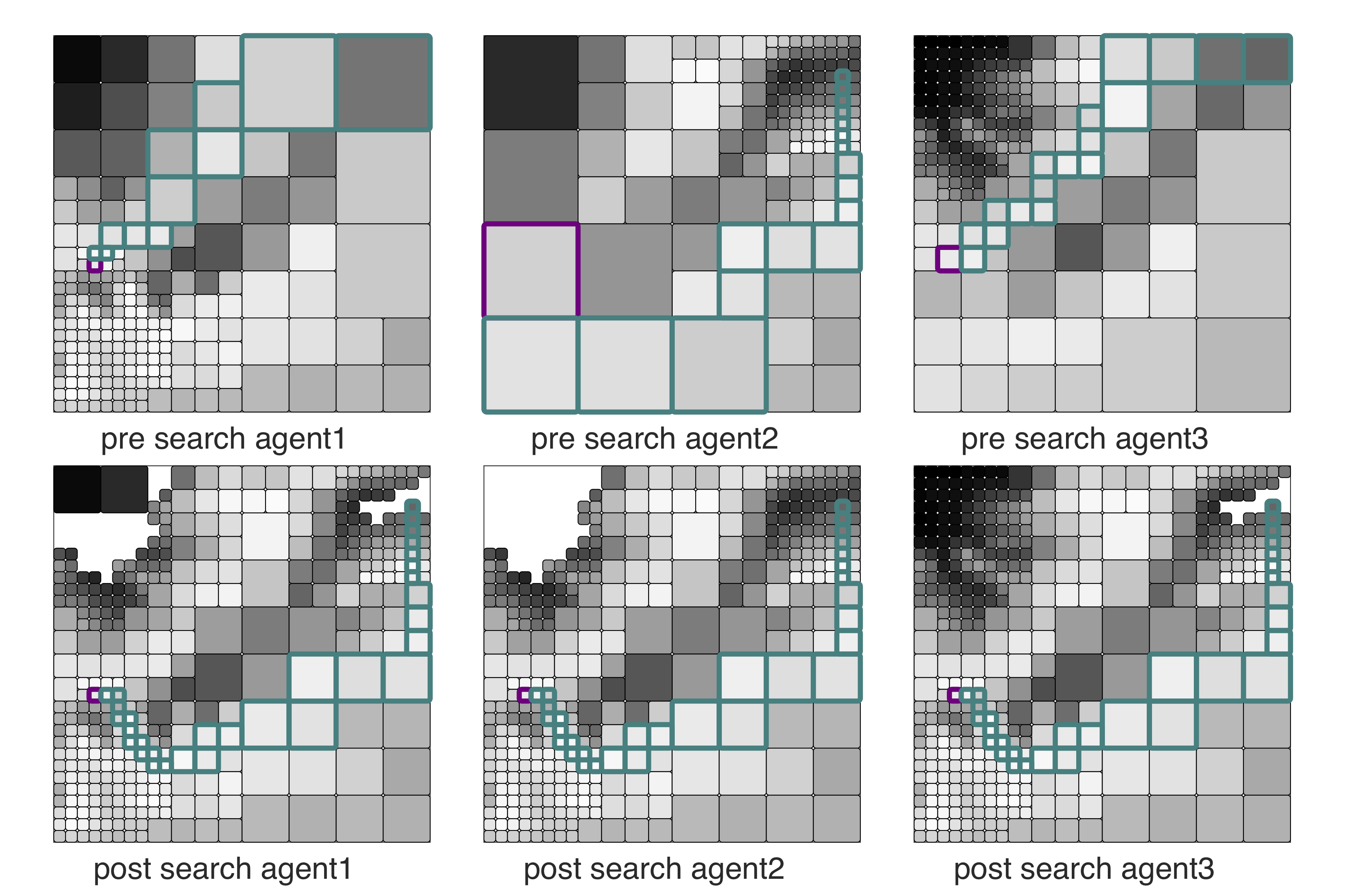
To reduce the search space and to formulate an innate perception-action loop, we use multi-resolution graph to plan. We construct fine resolution graph near the agent to accurately represent the environment in the vicinity of the agent, and coarser resolution far-away of the agent to reduce the search space. Inevitably, this multi-resolution framework may abstract some crucial information far-away from the agent, and consequently the solution quality can degrade.
But what if our agent is allowed to use other agents' finer information and vice versa to cooperatively find a better solution? If so, what would be an efficient way to communicate the information among the agents? We try to answer these questions with a distributed search algorithm. The main idea is to communicate only the expansion result of $A^*$ to locally rewire, and hence all agents attain a common subgraph that includes a provably optimal path in the most informative graph available among all agents if one exists, without necessarily communicating the entire graph.
Sponsors
Support for this project is provided by NSF and the Army Research Lab (ARL) DCIST project.
Selected Publications
- Tsiotras, P., and Bakolas,
E.,"A Hierarchical On-Line Path-Planning Scheme
Using Wavelets,'' European Control Conference, Kos, Greece, July
2-5, 2007.
- Tsiotras, P., "Multiresolution Hierarchical Path-Planning for Small UAVs,'' European Control Conference, Kos, Greece, July~2-5, 2007 (invited)
- Cowlagi, R. and Tsiotras, P., "Shortest Distance Problems in Graphs Using History-Dependent Transition Costs with Application to Kinodynamic Path Planning,'' American Control Conference, St. Louis, MO, June 10-12, 2009, (best student paper award), pp. 414-419.
- Cowlagi, R. and Tsiotras, P. "Beyond Quadtrees: Cell Decomposition for Path Planning using the Wavelet Transform," 46th IEEE Conference on Decision and Control, New Orleans, LA, Dec. 12-14, 2007, pp. 1392-1397.
- Cowlagi, R., and Tsiotras, P., "Multiresolution Path Planning with Wavelets: A Local Replanning Approach,'' American Control Conference, Seattle, WA, June 1-13, 2008, pp. 1220-1225.
- Bakolas, E., and Tsiotras, P., "Multiresolution Path Planning Via Sector Decompositions Compatible to On-Board Sensor Data,'' AIAA Guidance, Navigation, and Control Conference, Honolulu, HI, Aug. 18-21, 2008, AIAA Paper 2008-7238.
- Cowlagi, R., and Tsiotras, P., "Multi-resolution Path Planning: Theoretical Analysis, Efficient Implementation, and Extensions to Dynamic Environments,'' 49th IEEE Conference on Decision and Control, Atlanta, GA, Dec. 15-17, 2010, pp. 1384-1390.
- Lu, Y., Huo, Y., and Tsiotras, P., "Beamlet-like Data Processing for Accelerated Path-Planning Using Multiscale Information of the Environment,'' 49th IEEE Conference on Decision and Control, Atlanta, GA, Dec. 15-17, 2010, pp. 3808-3813
- Tsiotras, P., Jung, D., and Bakolas, E., "Multiresolution Hierarchical Path-Planning for Small UAVs Using Wavelet Decompositions,'' Journal of Intelligent and Robotic Systems, doi: 10.1007/s10846-011-9631-z
- Lu, Y., Huo, Y., and Tsiotras, P., "An Accelerated Path-Finding Algorithm Using Multiscale Information,'' IEEE Transactions on Automatic Control, 2012
- Lu, Y., Huo, X., Arslan, O., and Tsiotras, P., "An Incremental, Multi-Scale Search Algorithm for Dynamic Path Planning with Low Worst Case Complexity,'' IEEE Transactions on Man, Systems and Cybernetics, Part B: Cybernetics, 2012
- Cowlagi, R. and Tsiotras, P., "Hierarchical Motion Planning with Kinodynamic Feasibility Guarantees,'' IEEE Transactions on Robotics, 2012
- Hauer, F., Kundu, A., Rehg, J., and Tsiotras, P., "Multi-scale Perception and Path Planning on Probabilistic Obstacle Maps,'' IEEE International Conference on Robotics and Automation, Seattle, WA, May 26-30, 2015, pp. 4210--4215, doi:10.1109/ICRA.2015.7139779
- Hauer, F., Tsiotras, P., "Reduced Complexity Multi-Scale Path-Planning on Probabilistic Maps,'' IEEE International Conference on Robotics and Automation, Stockholm, Sweden, May 16-21, 2016, pp. 83-88, doi:10.1109/ICRA.2016.7487119