
Environment-Agent Interaction in Autonomous Networked Teams with Applications to Minimum-Time Coordinated Control of Multi-Agent Systems
Recent technological advances in the field of
autonomous vehicles and networked control systems have resulted in a
growing need for more flexible mission planning and execution
architectures both for military and civilian applications alike,
compared to the traditional single-platform monolithic paradigm.
Deployment of networks of autonomous vehicles (agents) would potentially
result in more robust mission planning and execution, with increased
levels of autonomy, and for a large spectrum of applications ranging
from environmental monitoring, distributed surveillance, resource
allocation, tracking of multiple targets, etc, to mention a few. This
"network-centric'' paradigm utilizes teams of autonomous vehicles
(aerial, terrestrial and underwater) working in unison by exchanging
information to plan and execute a common mission in a decentralized, yet
cooperative manner. This new paradigm brings about a slew of challenging
problems, ranging from persistent communication, coordinated task
assignment and prioritization, distributed estimation, distributed
decision making, etc. These challenges are even more pronounced for
small size UAVs/MAVs, which have dynamic responses dominated by
short time scales and a strong interaction with the environment (that
is, the effect of winds, the presence of pop-up threats, etc). They have
also limited onboard computational and power resources. The objective of
this research is to develop strategies for teams of UAVs that take into
account the interaction with the environment and to do so in a
computationally efficient manner to allow on-board implementation.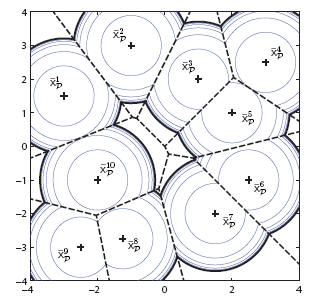
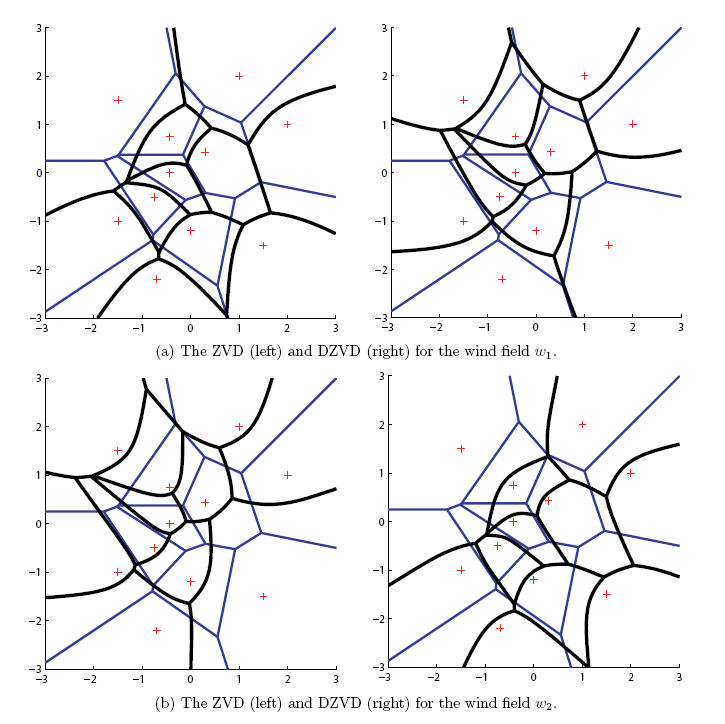
Motion coordination and path-planning algorithms for small UAVs/MAVs are investigated using appropriate, state-dependent performance metrics that capture the interactions of the vehicle with the environment, the mission objectives, as well as the system theoretic attributes of the network. The concept of generalized Zermelo-Voronoi diagram plays a key role in the proposed approach. In contrast to standard Voronoi decompositions that are based on Euclidean distance, generalized (Zermelo) Voronoi diagrams capture much better the dynamics of the state of the agents in the network (e.g., estimated-time-of-arrival). Several problems will be investigated in this context: First, computationally simple and efficient, distributed algorithms for the construction of generalized Voronoi diagrams with respect to suitable generalized metrics, are developed. These generalized Voronoi partitions can be tailored to the particular mission at hand. Second, and with the help of these diagrams, the proximity relations between different agents and/or between the agents and a set of targets can be characterized. The approach allows for the development of decentralized and distributed control strategies for a wide spectrum of applications, ranging from environmental monitoring, distributed surveillance, multiple target allocation, coordinated target intercept and attack, landing site selection, etc.
Sponsors
This project is supported by NSF.
Selected Publications
- Bakolas, E. and Tsiotras, P., "Optimal Synthesis of the Zermelo-Markov-Dubins Problem in a Constant Drift Field,'' Journal of Optimization Theory and Applications, Vol. 155, No. 2, Nov. 2012, doi: 10.1007/s10957-012-0128-0
- Bakolas, E. and Tsiotras, P., "The
Zermelo-Voronoi Diagram: a Dynamic Partition Problem,'' Automatica, Vol. 46, No. 12, pp. 2059-2067, 2010, doi:10.1016/j.automatica.2010.09.003.


- Bakolas, E., and Tsiotras, P., "Relay Pursuit of a Maneuvering Target Using Dynamic Voronoi Diagrams,'' Automatica, Vol. 48, pp. 2213-2220, Aug. 2012, doi:10.1016/j.automatica.2012.06.003
- Bakolas, E. and Tsiotras, P., "Feedback Navigation in an Uncertain Flow-Field and Connections with Pursuit Strategies,'' AIAA Journal of Guidance, Control, and Dynamics, Vol. 35, No. 4, pp. 1268-1279, July-August 2012, doi: 10.2514/1.54950
- Bakolas, E. and
Tsiotras, P., "Time-Optimal Synthesis for the Zermelo-Markov-Dubins Problem:
the Constant Wind Case,'' American Control Conference, Baltimore, MD,
June 30-July 2, 2010.
- Bakolas, E. and
Tsiotras, P., "Minimum-Time Paths for a Light Aircraft in the Presence of
Regionally-Varying Strong Winds,'' Infotech at Aerospace, Atlanta,
GA, April 20-22, 2010.
- Bakolas, E. and Tsiotras, P., "Optimal
Pursuit of Moving Targets using Dynamic Voronoi Diagrams,'' 49th
IEEE Conference on Decision and Control, Atlanta, GA, Dec. 15-17,
2010, pp. 7431-7436.
- Bakolas, E. and Tsiotras. P., "On the Relay Pursuit of a Maneuvering Target,'' 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, Dec.12-15, 2011, pp. 4270-4275, doi:10.1109/CDC.2011.6160323.
- Bakolas, E. and Tsiotras, P., "Optimal Partitioning for
Spatiotemporal Coverage in a Drift Field,'' Automatica,
Vol. 49, No. 7, pp. 2064-2073, July 2013, doi:
10.1016/j.automatica.2013.04.013
- Sun, W., and Tsiotras, P., "A Sequential Pursuer-Target Assignment
Problem Under External Disturbances,''
52nd IEEE Conference on Decision and Control Conference, Florence, Italy, Dec. 10-13, 2013. - Sun, W. and Tsiotras, P., "An Optimal
Evader Strategy in a Two-Pursuer One-Evader Problem,'' 53rd IEEE
Conference on Decision and Control, Los Angeles, CA, Dec. 15-17,
2014, pp. 4266-4271.
- Sun, W., Theodorou, E., and Tsiotras, P., "Continuous-Time
Differential Dynamic Programming with Terminal Constraints,''
IEEE Symposium on Adaptive Dynamic Programming and Reinforcement
Learning, Orlando, FL, Dec. 9-12, 2014, pp. 289-294.
- Sun, W., and Tsiotras, P., "Pursuit Evasion Game of Two Players
under an External Flow Field," American Control Conference,
Chicago, IL, July 1-3, 2015, pp. 5617-5622,
doi:10.1109/ACC.2015.7172219
- Sun, W., Theodorou, E. and Tsiotras, P., "Game Theoretic Continuous
Time Differential Dynamic Programming,'' American Control Conference,
Chicago, IL, July 1-3, 2015, pp. 5593-5598,
doi:10.1109/ACC.2015.7172215