
Coordinated Attitude Control and Energy Storage On-Board Spacecraft
Traditional chemical batteries on-board orbiting spacecraft have several limitations stemming from their inherent unreliability, low depth of discharge, heavy weight, limited life, etc. An alternative to the chemical batteries for energy storage and power generation for future spacecraft is the use of electromechanical (e.g., flywheel) batteries.
Since most orbiting spacecraft already incorporate moving wheels (e.g., reaction, momentum wheels, CMG's) for attitude control, the prospect of using these flywheels in an Integrated Power and Attitude Control System (IPACS) seems natural and appealing. Air Force studies have shown mass benefits of 56% and power increase benefits of 45% via the used of an IPACS. Several technical challenges need to be overcome, however, before an IPACS becomes part of standard spacecraft subsystems. Gyroscopics of the rotor, its continuously changing speed, flexibility, mass unbalance, low-loss operation, coordination between attitude control and energy storage subsystems, etc. must be successfully accommodated. We have developed algorithms for the coordinated attitude and energy storage on board a spacecraft using momentum wheels or variable-speed control moment gyros (VSCMGs). The latter are novel actuators that are especially suitable for IPACS applications. We have provided the first ever complete analysis for an the IPACS problem using VSCMGs, including a comprehensive study of singularity analysis and avoidance. Both model-based and adaptive controller which do not depend on the knowledge of the moment of inertial matrix have been developed. An additional controller module allows the wheel speeds to be the same, if required, without compromising the other objectives.
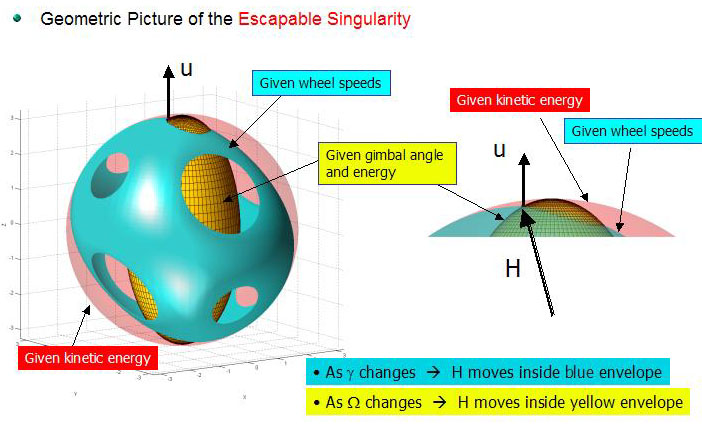
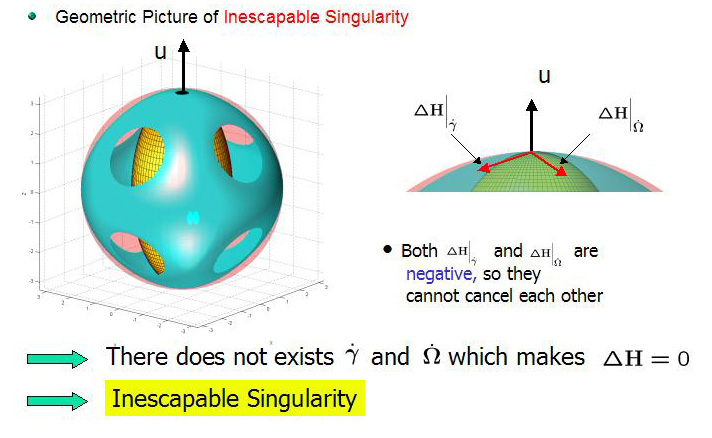
A problem with using VSCMG as actuators for an Integrated Power and Attitude Control System (IPACS) is the possibility of encountering singularities. Singularities correspond to gimbal angle configurations for which the VSCMG cluster cannot produce the requested torque or power. We have developed control laws that handle these singularities.
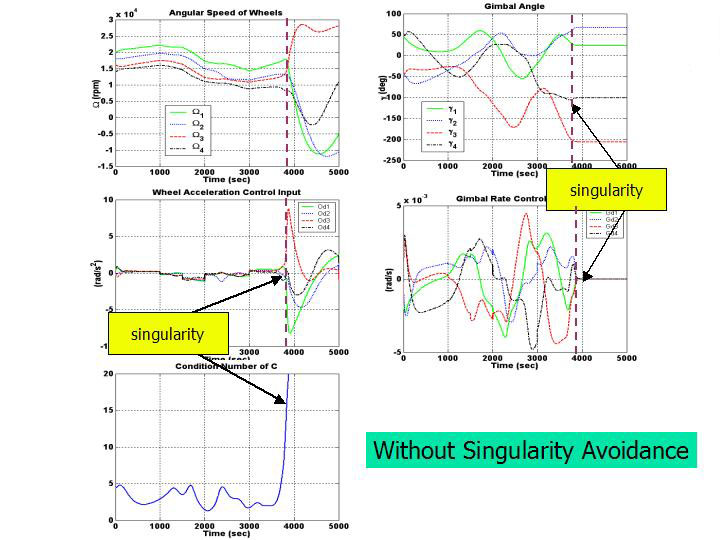
The following figure shows the result of a maneuver without a singularity avoidance control law.
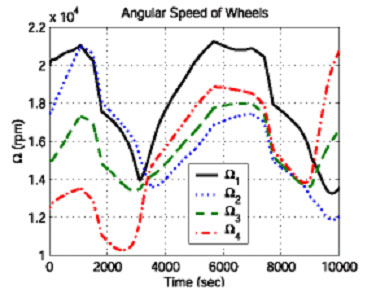
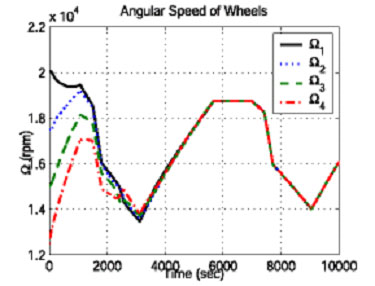
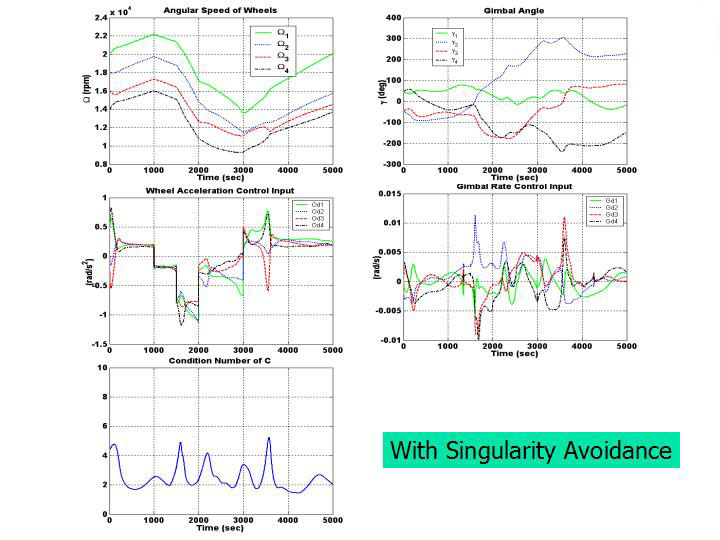
The following figure shows the same maneuver with the singularity avoidance control law active.
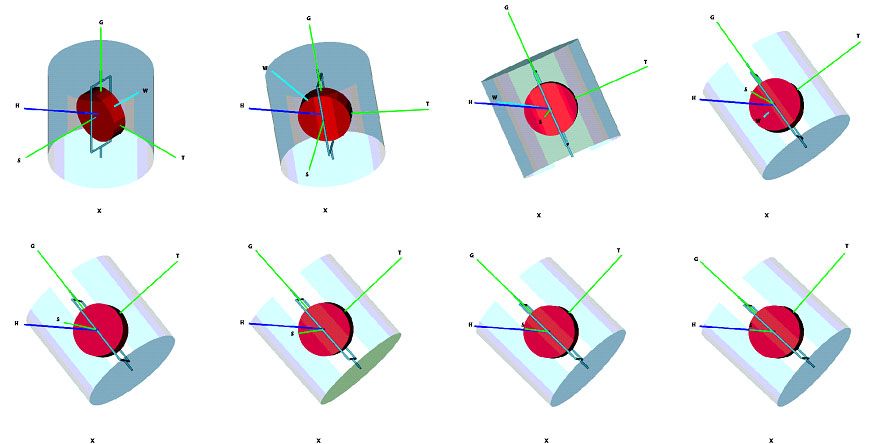
We are also investigating the problem of controlling a spacecraft with a single VSCMG. Only two control torques are available to stabilize the spacecraft in this case. This is an underactuated system. Due to the angular momentum conservation constraint, complete attitude reorientation is not possible. In fact, for a detumbling maneuver, the wheel spin axis has to point along the direction of the original angular momentum vector. Both linear and nonlinear control laws have been developed to null the angular velocity vector from arbitrary orientations. The snapshots below show a stabilizing maneuver with a single VSCMG.
Sponsors
This project is sponsored by AFOSR and the Space Vehicles Directorate of AFRL.
Selected Publications
- Yoon, H. and Tsiotras, P., "Singularity Analysis of Variable Speed Control Moment Gyros,'' Journal of Guidance, Control, and Dynamics, Vol. 27, No. 3, pp. 374--386, 2004.
- Yoon, H. and Tsiotras, P. "Spacecraft Adaptive Attitude Control And Power Tracking With Single-Gimballed Variable Speed Control Moment Gyroscopes,'' Journal of Guidance, Control, and Dynamics, Vol. 25, No. 6, pp. 1081--1090, 2002.
- Yoon, H. and Tsiotras, P., "Singularity Analysis and Avoidance for VSCMGs -- Part I: No Power Constraint Case,'' AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Providence, RI, August 16--19, 2004.
- Yoon, H. and Tsiotras, P., "Singularity Analysis and Avoidance for VSCMGs -- Part II: Power Constraint Case,'' AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Providence, RI, August 16--19, 2004.
- Richie, D., Tsiotras, P. and Fausz, J., "Simultaneous Attitude Control and Energy Storage Using VSCMGs: Theory and Simulation,''Proceedings, American Control Conference, Arlington, Virginia, June 25-27, 2001, pp. 3973--3979.
- Marshall, A. and Tsiotras P., "Spacecraft Angular Velocity Stabilization Using A Single-Gimbal Variable Speed Control Moment Gyro,'' AIAA Paper 03-5654, AIAA Guidance, Navigation and Control Conference, Austin, TX, 2003. This paper was included in the TEN BEST PAPER LIST of the conference.
Pictures
Movies