
Decision-Making for Autonomous Systems with Limited Resources
Future Intelligent Physical Systems (IPS) will undoubtedly rely on autonomous long-term decision-making in order to handle, in a robust manner, unanticipated, dynamically changing scenarios through continuous adaptation and learning. Most current algorithms for decision-making are rather data-intensive and may not be capable of fast, close-to-real-time, human-like behavior. Extracting actionable information from data -- and, similarly, how to best represent this information-- under limited time and computational resources, remains a major challenge. It is thus of great interest to develop decision-making algorithms for IPS that account for the cost of processing and communicating the collected data, leading to interpretable, legible actions. In this research we use the bounded rational paradigm, originally introduced in the economics literature, to explain decisions taken by humans. According to this bounded rationality paradigm, human beings tend to weight the benefits of reaching the "best'' or "most informed'' decision, versus the pitfalls associated with the time, energy and effort needed to collect all the information to reach that decision. This is especially true when the environment is uncertain and/or complex, the task is challenging and is dominated by nonlinear phenomena, when the input is constrained, etc. In this case, efficient and timely computation rests on the ability of the decision-maker to look at the problem at the "right'' level of detail to act accordingly. This can be achieved by constructing suitable hierarchical abstractions of the problem. Hierarchies are also a powerful source of heuristics that can be used to shortcut exact computation of complex quantities.
Sponsors
This project is funded by NSF, ONR,
and ARL.
Selected Publications
- Tsiotras, P., "Bounded Rationality in Learning, Perception,
Decision-Making, and Stochastic Games,'' in
Handbook of Reinforcement Learning and Control, Eds: K. Vamvoudakis, Y. Wan, F. Lewis, D. Cansever, Studies in Systems, Decision and Control Series, Vol. 325, pp. 491-523, Springer, 2021.
doi:10.1007/978-3-030-60990-0 - Maity, D., and Tsiotras, P., "Optimal Controller Synthesis and
Dynamic Quantizer Switching for Linear Quadratic-Gaussian Systems,"
IEEE Transactions on Automatic Control, Vol. 67, No. 1, pp.
382-389, 2022.
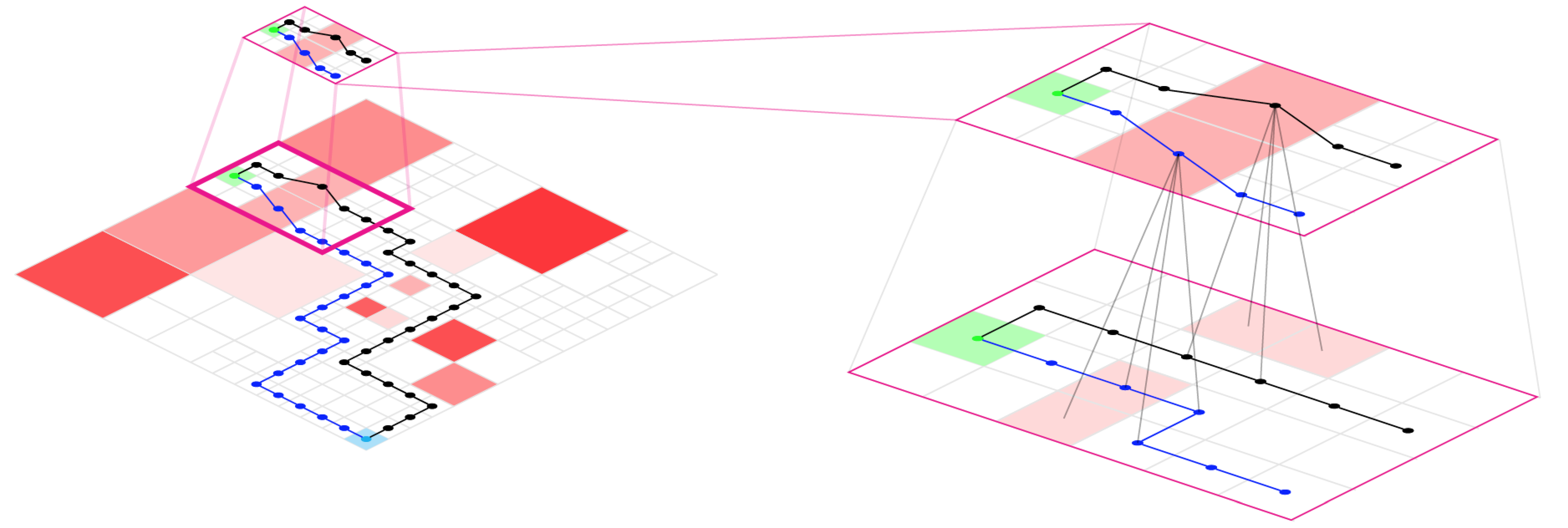
doi: 10.1109/TAC.2021.3057338 - Larsson, D., and Maity, D., and Tsiotras, P., "Information-Theoretic Abstractions for Planning for Agents with Computational Constraints," IEEE Robotics and Automation Letters, Vol. 6, No. 4, pp. 7651-7658, 2021, doi: 10.1109/LRA.2021.3099995
- Larsson, D., and Tsiotras, P., "Hierarchical
State Abstractions for Decision-Making Problems with Computational
Constraints,'' 56th IEEE Conference on Decision and Control,
Melbourne, Australia, Dec. 12--15, 2017, pp. 1138--1143, doi: 10.1109/CDC.2017.8263809

- Larsson, D., Kotsalis, G., and Tsiotras, P., "Nash and Correlated Equilibria for Pursuit- Evasion Games Under Lack of Common Knowledge,"
57th IEEE Conference on Decision and Control, Miami, FL, Dec. 17–19, 2018, pp. 3579–3584. doi:
10.1109/CDC.2018.8619168
- Lim, J., and Tsiotras, P., "MAMS-A*: Multi-Agent Multi-Scale A*,'' International Conference on Robotics and Automation, Paris, France, May 31-June 4, 2020, doi: 10.1109/ICRA40945.2020.9197045
- Guan, Y., Maity, D., Kroninger, C., and Tsiotras, P., "Bounded-Rational Pursuit-Evasion Games,'' American Control Conference, New Orleans, LA, May 26-28, 2021, pp. 3216-3221, doi: 10.23919/ACC50511.2021.9483152
- Zhang, Q., Guan, Y., and Tsiotras, P., "Learning Nash Equilibria in Zero-Sum Stochastic Games via Entropy-Regularized Policy Approximation," 30th International Joint Conference on Artificial Intelligence, Montreal, Canada, Aug. 21-26, 2021, https://arXiv:2009.00162
- Guan, Y., Zhou, M., Pakniyat, A., and Tsiotras, P. "Shaping Large Population Agent Behaviors Through Entropy-Regularized Mean-Field Games,'' American Control Conference, Atlanta, GA, June 8-10 , 2022
External Links
- TBA