Design and Construction of Autopilot of a UAV
A group of undergraduate and graduate students are involved in the design and construction of a remotely piloted airplane which will be equipped with an autopilot to fly with operator assistance. The autopilot is built around the Rabbit FCM3400 single-board microcontroller. Additional instrumentation includes a GPS receiver, pressure sensor, air velocity sensor (pitot tube), RF communication receiver and transmitter, accelerometers, magnetometer, rate gyros, video camera.
Sponsors
This project is sponsored by internal Georgia Tech funds and NSF.
Selected Publications
- Jung, D., Levy E., Zhou, D., Fink, R., Earl, A., Moshe, J. and Tsiotras, P., ``Design and Development of a Low-Cost Test-Bed for Undergraduate Education in UAVs,'' 44th IEEE Conference on Decision and Control/European Control Conference ECC 2005, Seville, Spain, Dec. 12-15, 2005.
- ung, D., and Tsiotras, P., "Inertial Attitude and Position Reference System Development for a Small UAV,'' AIAA Infotech at Aerospace, Rohnert Park, CA, May 7-10, 2007, AIAA Paper 07-2763
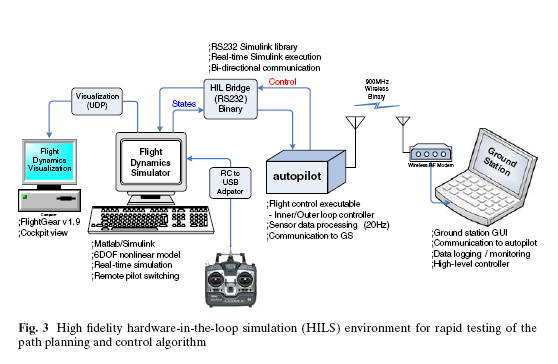
- Jung, D., and Tsiotras, P., "Modelling and Hardware-in-the-Loop Simulation for a Small Unmanned Aerial Vehicle,'' AIAA Infotech at Aerospace, Rohnert Park, CA, May 7-10, 2007, AIAA Paper 07-2768
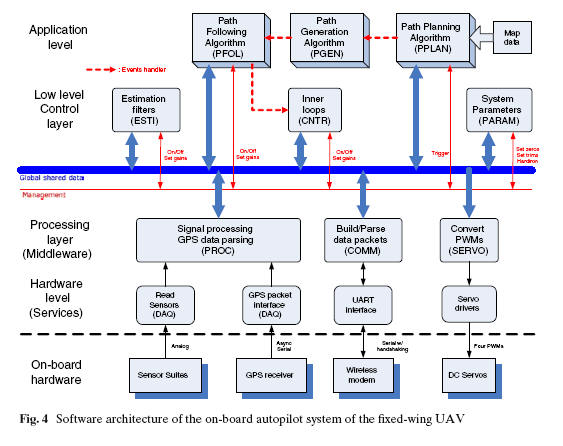
- ung, D., Ratti, J., and Tsiotras, P., "Real-time Implementation and Validation of a New Hierarchical Path Planning Scheme for UAVs via Hardware-in-the-Loop Simulation,'' International Symposium of Unmanned Aerial Vehicles (UAV'08), Orlando, FL, June 23-24, 2008J