Zero and Low-Bias Control of Active Magnetic Bearings
Efficient operation of flywheel electromechanical batteries necessitates minimization of energy losses (mechanical and other). To avoid excessive friction losses, it is imperative to use AMB's in order to support the spinning rotor. Although mechanical (friction) losses are eliminated using AMB's, electromagnetic losses still exist in a flywheel/AMB system due to eddy current or ohmic effects. These losses can be a significant portion of the overall power losses in high-speed flywheels.
One way to reduce eddy current and ohmic losses is to reduce or eliminate the bias current during AMB operation. The force generated by an electromechanically activated bearing is a nonlinear function of the flux (or current). As a result, it is customary to linearize the force/flux characteristic by introducing a bias flux (or current). Typical values of the bias current are one-third to one-half of the maximum (saturation) current level for each electromagnet. Since electromagnetic losses at the bearings are proportional to the bias flux, operation with very small or zero bias is imperative for power efficiency. Complete elimination of the bias flux results in a linearly uncontrollable system. Zero-bias operation thus calls for nonlinear control techniques. Reduction or elimination of the bias current leads to a nonlinear region which is dominated, among other things, by slew-rate force limitations close to the origin. These limitations manifest themselves as saturation constraints on the power amplifier voltage driving the coils of the electromagnets. The problem of designing low-bias control laws for AMB's subject to saturation constraints is a thus a nontrivial nonlinear control problem. We have developed advanced nonlinear control laws for AMBs operating at very-low or zero-bias. Experimental results have confirm the theoretic predictions.
Sponsors
This project is sponsored by AFRL and private industry.
Selected Publications
- Tsiotras, P. and Wilson, B.C., "Zero- and Low-Bias Control Designs for Active Magnetic Bearings,'' IEEE Transactions on Control Systems Technology, Vol. 11, No. 6, pp. 889--904, 2003.
- Tsiotras, P., Wilson, B., and Bartlett, R. "Control of a Zero-Bias Magnetic Bearing Using Control Lyapunov Functions,'' Proceedings, 39th IEEE Conference on Decision and Control, Sydney, Australia, December 12-15, 2000, pp. 4048--4053.
- Tsiotras, P. and Arcak, M., "Low-Bias Control of AMB Subject to Voltage Saturation: State-Feedback and Observer Designs,'' IEEE Transactions on Control Systems Technology, IEEE Transactions on Control Systems Technology, Vol. 13, No. 2, pp. 262--273, 2005.
- Tsiotras, P. and Arcak, M., "Low-Bias Control of AMB Subject to Voltage Saturation: State-Feedback and Observer Designs,'' Proceedings, 41st IEEE Conference on Decision and Control, Las Vegas, Nevada, December 10-13, 2002, pp. 2474--2479.
- Tsiotras, P. and Velenis, E., "Low-Bias Control of AMB's Subject to Saturation Constraints,'' IEEE International Conference on Control Applications, Ancorage, Alaska, September 25-27, 2000, pp. 138--143.
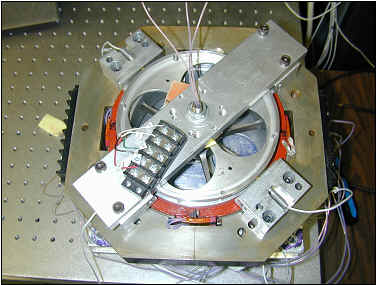
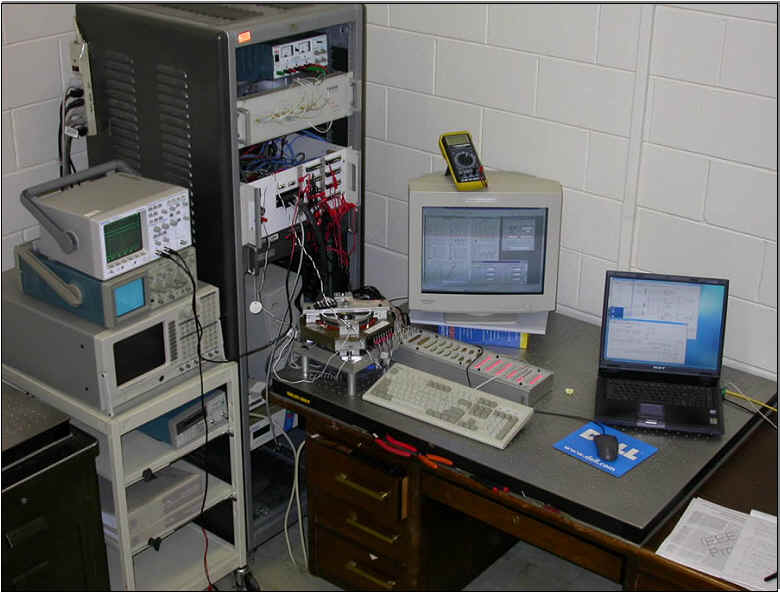
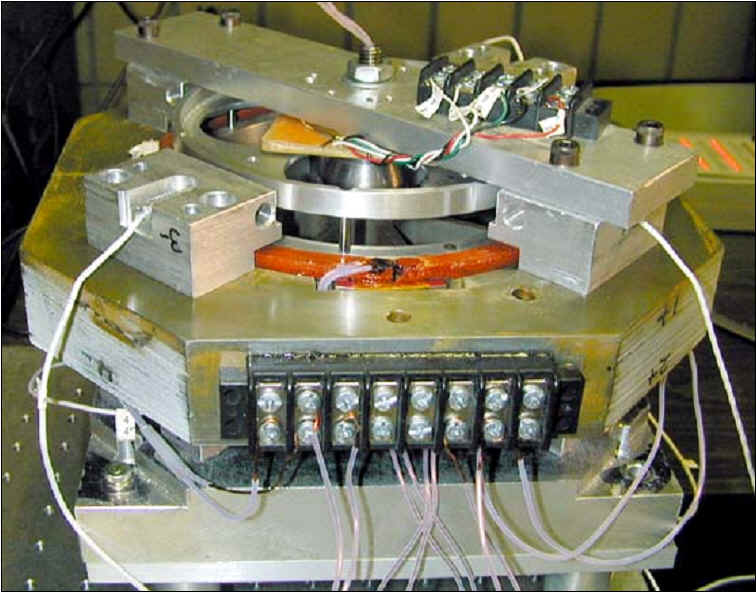
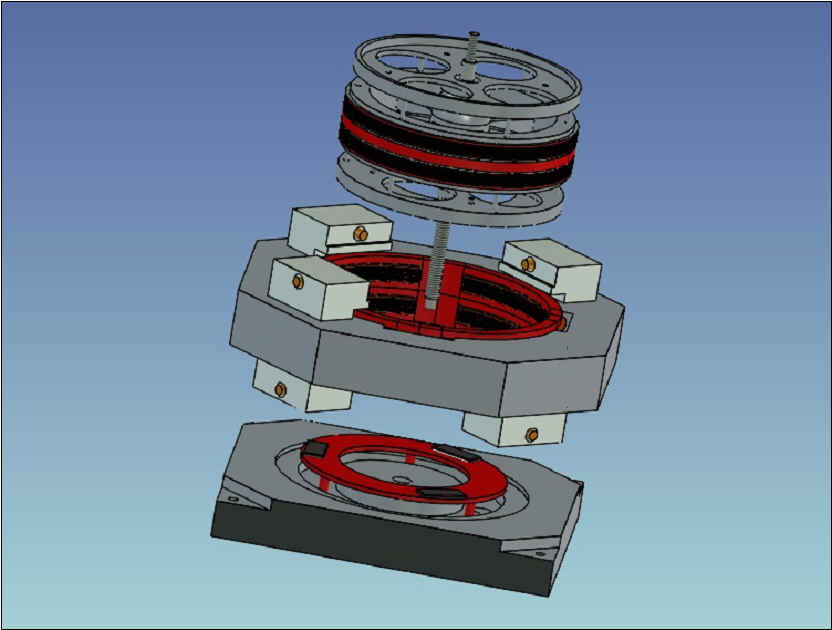
Pictures of Experimental Test Rig