
Next Generation Active Safety Control Systems for Crash-Avoidance of Passenger Vehicles Using Expert Driver Knowledge
Car accidents result in more than 40,000 deaths and 2,780,000 injuries each year in the US alone and many more worldwide. Car accidents are, in fact, the leading cause of mortal injuries globally, accounting for almost 23% of the total. They are the leading cause of death between ages 3-33. The World Health Organization is projecting that by the year 2020, road traffic accidents will be the 3rd leading cause of death due to injury and disease combined, up six notches from 9th place in 1990. The current state-of-the-art of passive and active automotive safety systems is not adequate to reverse the previous statistics. A more comprehensive approach is needed. Supported by the advent of MEMS sensor technology, the emergence of embedded control software, and the rapid progress in computer and DSP technology, several automotive manufacturers have responded with a more holistic view of accident prevention that incorporates situational awareness and new control systems with learning and decision capabilities. Ford, and its partner company Volvo of Sweden, for instance, have declared their intention to develop an "accident-free'' car by the next 20 years capitalizing on such new technology. Several government agencies around the world have announced similar goals. Meeting these objectives will require some radical changes in the way current active safety systems operate and interact with the human driver. The objective of this research is to support the previous active safety initiatives by proposing a new way of looking at the problem of crash avoidance. In this work we advocate the study, analysis, capture and encapsulation of expert driver knowledge within a rigorous mathematical framework and the incorporation of this knowledge inside the control architecture. These on-demand auto-pilots will take advantage of the situational sensing capabilities of future vehicles to detect impending accidents. They will be able to determine whether normal driver reaction is adequate to avoid a crash. If not, they will intervene and, if necessary, override the driver's commands by initiating steering, braking or accelerating commands to drive away from an accident or -- whenever this is not possible -- mitigate the effects of the crash.
What we propose in this research is not unlike what the aerospace industry has done a long time ago. Indeed, the first control systems introduced in airplanes were relatively simple stability augmentation systems (SAS), whose main objective was to increase the
stability of certain modes of the airplane (e.g., modify the damping and natural frequency of the short-period mode, increase the damping of the dutch-roll mode, etc). With the advent of fast and reliable computers, and the development of more sophisticated control algorithms, the airplane manufacturers moved quickly to more comprehensive flight managements systems (FMS) which use actively
controlled modules, known as `"fly-by-wire'' (FBW) systems.
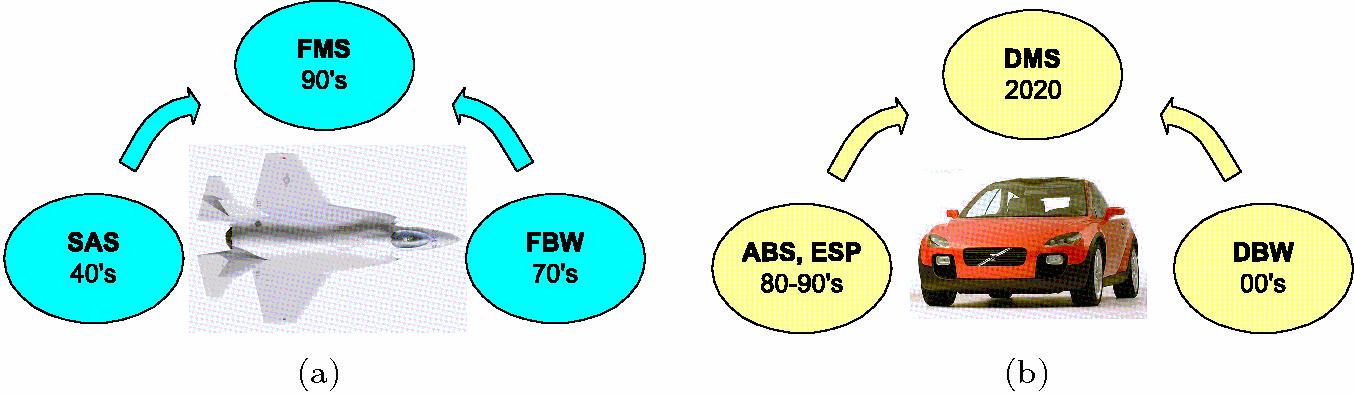
FBW systems, originally developed for high-performance military fighter aircraft are truly feedback systems: the on-board computer(s) intercepts the pilot's commands, interprets them accordingly, and decides the actual actuator input to apply at each instant of time. With a FBW system there is no direct mechanical connection between the pilot and the actuators. It is the job of the FBW/FMS system to alleviate the pilot from excessive workload and make sure that the airplane flies within its designed flight envelope ("envelope protection''). The success of FBW systems has made them a standard component in all current military aircraft as well as in the new generation of civilian aircraft.
Sponsors
Support for this project is provided by NSF in collaboration with Ford Motor Co.
Selected Publications
- Velenis, E., Tsiotras, P., and Lu, J., "Optimality Properties and Driver Input Parameterization for Trail-Braking Cornering,'' European Journal of Control, Vol. 14, No. 4, pp. 308-320, 2008, doi: 10.3166/EJC.14.308-320.
- Velenis, E., Tsiotras, P. and Lu J., "Trail-Braking Driver Input Parameterization for General Corner Geometry,'' SAE Motorsports Engineering Conference, Concord, NC, Dec. 2-4, 2008, SAE Paper 2008-01-2986.
- Cowlagi, R. and Tsiotras, P., "Shortest Distance Problems in Graphs Using History-Dependent Transition Costs with Application to Kinodynamic Path Planning,'' American Control Conference, St. Louis, MO, June 10-12, 2009, (best student paper award), pp. 414-419.
- Velenis, E., Frazzoli, E. and Tsiotras, P., "On Steady-State Cornering Equilibria for Wheeled Vehicles with Drift,'' 48th IEEE Conference on Decision and Control, Shanghai, China, Dec. 16-18, 2009, pp. 3545-3550.
- Chakraborty, I., Tsiotras, P. and J. Lu, "Mitigation of
Unavoidable T-bone Collisions at Intersections Through
Aggressive Maneuvering,'' 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, Dec. 12-15, 2011. - Velenis, E., Katzourakis, D., Frazolli, E., Tsiotras, P. and Happee, R., "Steady-State Drifting Stabilization of RWD Vehicles,'' Control Engineering Practice, Vol. 19, No. 11, Nov. 2011, pp. 1363-1376, doi:10.1016/j.conengprac.2011.07.010.
Movies
- A 90 deg skidding maneuver
- A Trail Braking maneuver
- A Pendulum Turn
- Ken Block
- Rollover recovery
- Steady-state drifting at large vehicle slip angle
- T-Bone Mitigation Maneuver