
Vehicle Dynamics and Control During Abnormal Driving
Achieving crash/accident avoidance or active safety for passenger vehicles has been refocused at NHTSA and the automotive industry. These active safety systems are electronically controlled, and include driver-assistance software and hardware, to prevent the vehicle from getting into trouble (e.g., skidding, tumbling, crashing, etc). The objective of this research project is to build on the existing state of knowledge from the aerospace control community (that has dealt with “fly-by-wire”, "directional control" and “envelope protection” problems since its inception), as well as on our own previous experience in the analysis of the dynamics and the optimal control of wheeled vehicles (especially the characterization of tire friction forces, and vehicle attitude and directional control) in order to develop new control methodologies for achieving vehicle performance that mimics the way expert humans drivers react during emergencies.
Sponsors
This project is sponsored by Ford Motor Co.
Selected Publications
- Velenis, E., Tsiotras, P., and Lu, J., "Aggressive Maneuvers on Loose Surfaces: Data Analysis and Input Parameterization,'' 15th IEEE Mediterranean Control Conference, June 26-29, Athens, Greece.
- Velenis, E., Tsiotras, P., and Lu, J., "Modeling Aggressive Maneuvers on Loose Surfaces: The Cases of Trail-Braking and Pendulum-Turn,'' European Control Conference, Kos, Greece, July 2-5, 2007.
- Velenis, E., Katzourakis, D., Frazolli, E., Tsiotras, P. and Happee, R., "Stabilization of Steady-State Drifting for a RWD Vehicle,'' 10th International Symposium on Advanced Vehicle Control (AVEC), Loughborough, UK, August 22- 26, 2010.
- Velenis, E., Frazzoli, E. and Tsiotras, P., "On Steady-State Cornering Equilibria for Wheeled Vehicles with Drift,'' 48th IEEE Conference on Decision and Control, Shanghai, China, Dec. 16-18, 2009, pp. 3545-3550.
- Scacchioli, A., Tsiotras, P., and Lu, J., "Nonlinear-Feedback Vehicle Traction Force Control with Load Transfer for Accident Avoidance,'' ASME Dynamic Systems and Control Conference (DSCC'09), Hollywood, CA, Oct. 12-14, 2009.
- Velenis, E., Frazzoli, E., and Tsiotras P., "Steady-State Cornering Equilibria and Stabilization for a Vehicle During Extreme Operating Conditions,'' International Journal of Vehicle Autonomous Systems, Special Issue on Autonomous and Semi-Autonomous Control for Safe Driving of Ground Vehicles, Vol.8, Nos. 2-4, pp. 217-241, 2010.
Pictures
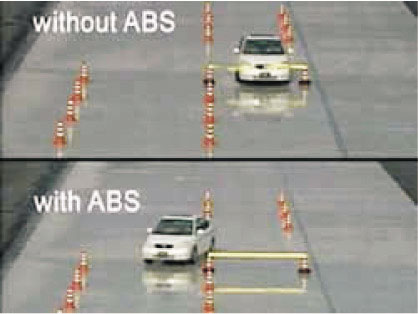
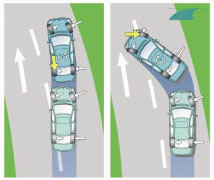
The ABS (left) prohibits wheel lockup during braking, allowing thus the driver to maintain directional control of the vehicle. The ESP system (right) is a yaw control system. It applies independent braking to the four wheels in order to generate the required moments
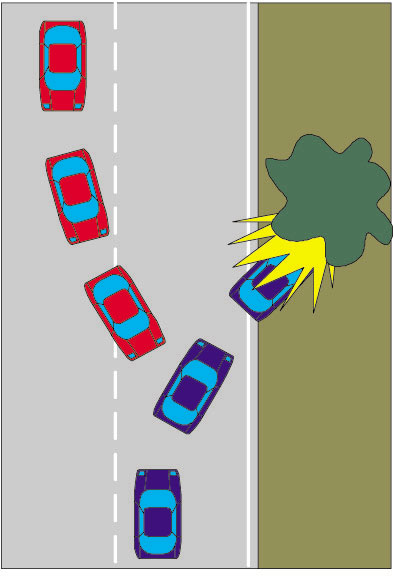
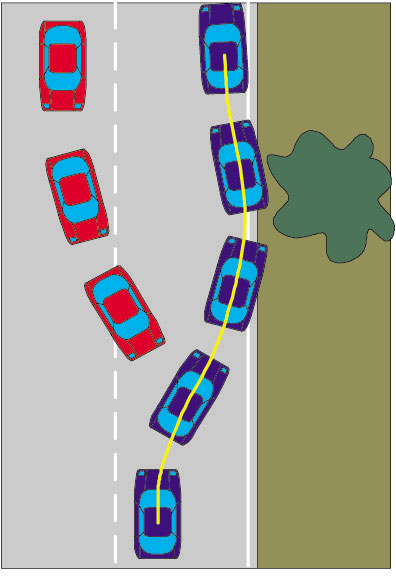
The increase in single-vehicle accidents involving ABS vehicles may be due to the wrong response by the driver. Since ABS maintains directional control even during hard braking, sudden or extreme steering by the driver may result in the vehicle driving off the road (left). A properly designed active control safety system will intervene, momentarily take over control of the vehicle, and correct the driver's command so as to maintain/recover control even under the most severe maneuvering (right).
Movies