
NASCAR: Neuro-inspired Adaptive Sensing and Control for Agile Response
NASCAR is a MURI activity between Georgia Tech, MIT and the University of Southern California. The objective of the MURI is to develop perception and planning algorithms that will achieve a quantum leap in the agility and speed of autonomous and semi-autonomous ground vehicles.
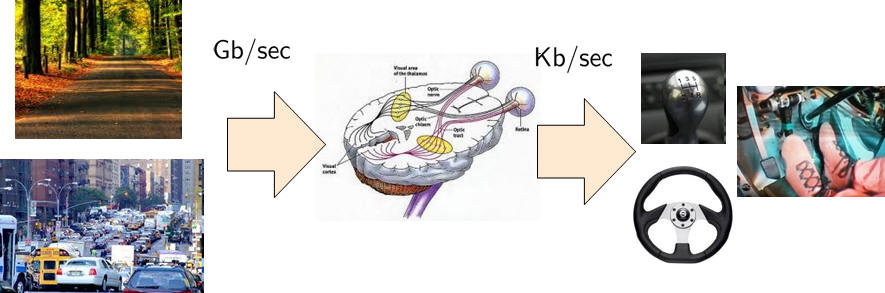
We will materialize this vision by proposing a radical departure
from the standard current practice of "perception and/or sensing
then control,'' and promote instead a new paradigm based on
"perception/sensing-for-control.'' We will achieve this
objective by leveraging attention-focused, adaptive perception
algorithms that operate on actionable data in a timely manner. Our
inspiration comes from human cognitive (decision) and execution
(control) models, especially those of expert human race drivers. By
encapsulating the cognitive and reflexive planning layers of human
expert drivers, we will make extensive use of prior,
context-dependent information, both at the sensing and execution
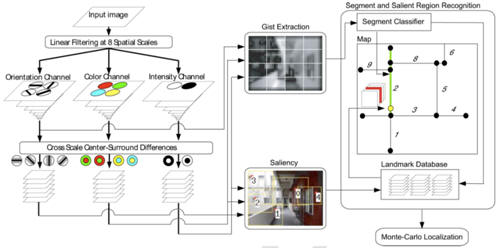
levels. We will use attention as a mediator to develop
attention-driven action strategies (including learning where to look
from expert drivers). By analyzing the saliency characteristics of a
scene we will locate the important "hot-spots'' that
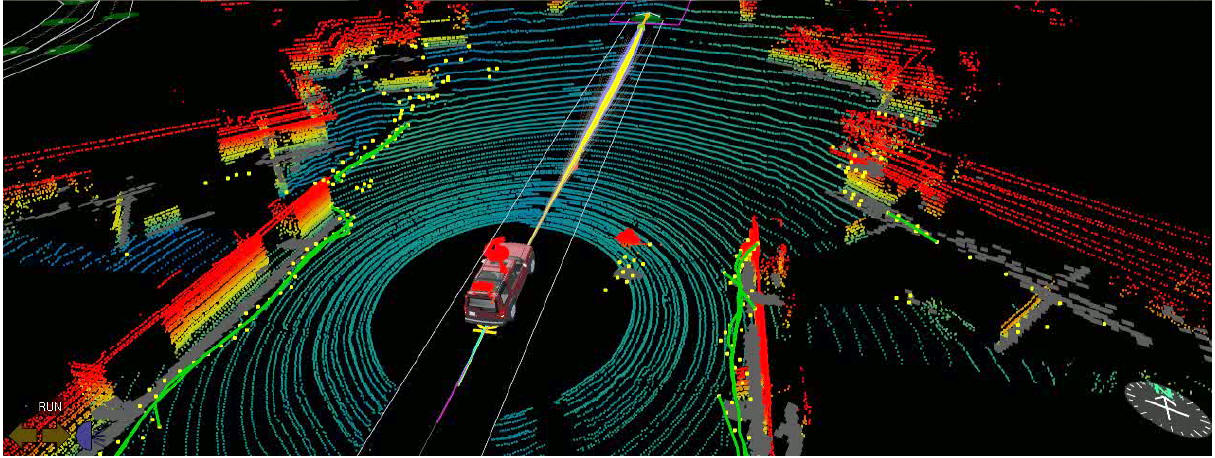
will serve as anchors for events. At the same time, we will make use
of fused exteroceptive and proprioceptive sensing to deduce the
terrain properties and friction characteristics to be used in
conjunction with predictive/proactive control strategies. By
studying and mimicking the visual search patterns and specialized
driving techniques of expert human drivers, we will develop
perception and control algorithms that will remedy the computational
bottleneck that plagues the current state of the art
It is well known that professional drivers use a series of specialized maneuvers, whose objective is to get rid of excess speed when entering a corner, reorient the vehicle quickly while inside the corner in preparation for exiting the corner with maximum speed, or for connecting back to back corners. They also take advantage of the load transfer when braking and accelerating. As evidenced by the pedagogical techniques used to teach such driving skills, most maneuvers are defined not only in terms of control actions taken in order to execute them, but also in terms of sensory cues and attention. In a departure from previous work on the subject, we will define motion primitives that integrate specialized techniques for both sensing and control. Our strategy is to study these specialized driving techniques (especially those used by expert rally drivers), analyze them by a formal mathematical framework, study their optimality and robustness properties, and finally derive the corresponding motion primitives in terms of integrated sensing and control strategies.

More information about this MURI activity can be found at the
"official" website for this project given below.
Website: http://amav.gatech.edu
Sponsors
Support for this project is provided by ARO.
Movies