
Information-Theoretic Trajectory Optimization for Motion Planning and Control with Applications to Space Proximity Operations
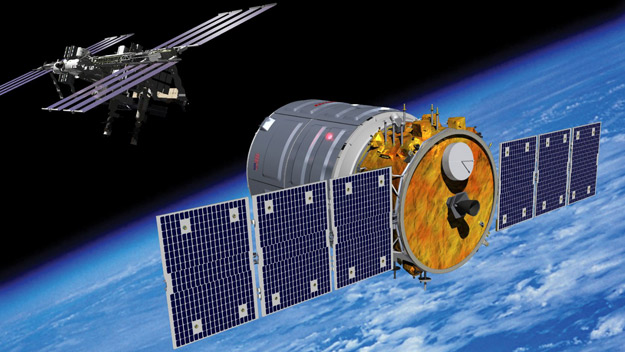
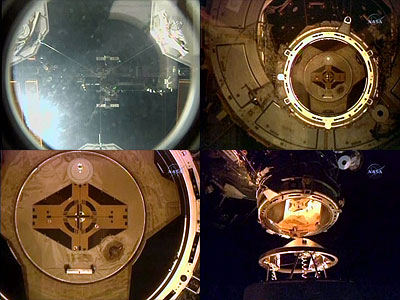
This proposal will develop unified perception and control guidance algorithms that utilize active exploration to enable robust sensing and planning of a free-flying space robot in the vicinity of another body in order to perform proximity operations (including autonomous rendezvous and docking in space). To achieve this objective, novel tools and methodologies from the field of stochastic optimal control and new advances describing the spacecraft attitude dynamics and kinematics will be employed. Finally, the results will be experimentally validated on a high-fidelity 5-dof spacecraft simulator facility.
The proposed research tackles a fundamental problem in autonomous/robotic systems, namely, the integrated sensing and planning under uncertainty. In the current paradigm perceptual cues (especially those based solely on visual information) serve essentially as surrogates of full-state feedback estimators, thus enforcing an artificial separation of perception and action. This dichotomy between sensory data acquisition/processing, and control/actuation strategies -- deeply rooted in the community for its wide applicability to the stabilization of linear systems subject to additive noise ("separation principle'') -- is unsuitable for this problem, where information gathering (perception/sensing) is tightly coupled with motion (control). To overcome the aforementioned limitations, in this work it is proposed to use tools from stochastic optimal control in order to extract actionable information from raw sensory inputs. A key ingredient of the proposed approach is to keep track of the first and second order statistics of the estimation error so that control actions depend on both of them. The result is a new, computationally more efficient, methodology to maximize information gathering during the exploration phase and to optimize over distributions of trajectories during the execution phase.
Traditionally, planning/control and perception/sensing have been treated as separate problems. Thus planning, control and estimation are treated without taking into account the action-perception interactions and interdependencies. These interdependencies are always present, especially in cases of nonlinear dynamical systems and for tasks such as planning over distributions of trajectories and active exploration for information maximization.
The project is in collaboration with Evangelos Theodorou. Please visit Prof. Theodorou's website for additional publciations.
Sponsors
This project is supported by NSF.
Selected Publications
- Sun, W., Theodorou, E., and Tsiotras, P., "Continuous-Time Differential Dynamic Programming with Terminal Constraints,'' IEEE Symposium on Adaptive Dynamic Programming and Reinforcement Learning, Orlando, FL, Dec. 9-12, 2014, pp. 289--294.
- Valverde, A., Filipe, N., Kontitsis, M. and Tsiotras, P., "Experimental Validation of an Inertia-Free Controller and a Multiplicative EKF for Pose Tracking and Estimation Based on Dual Quaternions,'' 38th AAS Guidance and Control Conference, Breckenridge, CO, Jan. 30-Feb. 4, 2014, AAS Paper 2015-017.
- Filipe, N., Kontitsis, M. and Tsiotras, P., "An Extended Kalman Filter for Spacecraft Pose Estimation Using Dual Quaternions,'' American Control Conference, Chicago, IL, July 1--3, 2015.
- Pan, Y. and Theodorou, E. A., "Data-Driven Differential Dynamic Programming Using Gaussian Processes," American Control Conference, Chicago, IL, July 1-3, 2015.
- Pan, Y. and Theodorou, E. A., "Probabilistic Differential Dynamic Programming," In Neural Information Processing Systems (NIPS), Montreal, Canada, Dec 7-13 2014, pp. 1907-1915.
- Pan, Y. Bakshi, K. and Theodorou, E. A., "Robust Trajectory Optimization: A Stochastic Cooperative Game Theoretic Approach," In Robotics Science and Systems (RSS), Rome, Italy, July 13-17, 2015.
- De La Torre, G. and Theodorou, E. A., "Stochastic Variational Integrators for System Propagation and Linearization." In Institute of Mathematics and its Applications (IMA) Conference on Mathematics of Robotics, Oxford, England, Sept. 9-11, 2015.
- Zhang, G., Kontitsis, M., Filipe, N., Tsiotras, P., and Vela, P., "Cooperative Relative Navigation for Space Rendezvous and Proximity Operations Using Controlled Active Vision,'' Journal of Field Robotics, (to appear)
- Filipe, N., Kontitsis, M., and Tsiotras, P., "Multiplicative Extended Kalman Filter for Spacecraft Pose Estimation Using Dual Quaternions,'' AIAA Journal of Guidance, Control, and Dynamics, (to appear)
- Filipe, N., and Tsiotras, P., "Adaptive Position and Attitude
Tracking Controller for Satellite Proximity Operations using Dual
Quaternions,'' AIAA Journal of Guidance, Control, and Dynamics,
Vol. 38, No. 4, pp. 566-577, April 2015, doi:
10.2514/1.G000054