
Advanced Driver Assistance and Active Safety Systems through Driver’s Controllability Augmentation and Adaptation
Driven
by federal directives and the public mandate to increase safety, several
automotive manufacturers have declared their intention to radically
reduce traffic accidents (or eliminate them altogether) in the near
future, via the use of on-board active safety control systems (ASCS).
Developing an accident-free vehicle will require radical changes in the
way current ASCS operate and interact with human drivers. Our goal in
this project is to support these initiatives of the automotive industry
by introducing the element of learning and adaptation to the next
generation of ASCS. This research will directly support the development
of intelligent, customized ASCS in collaboration plan with Ford Motor
Company.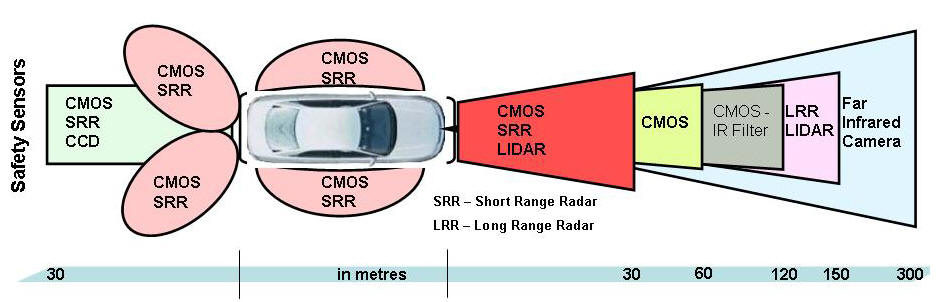
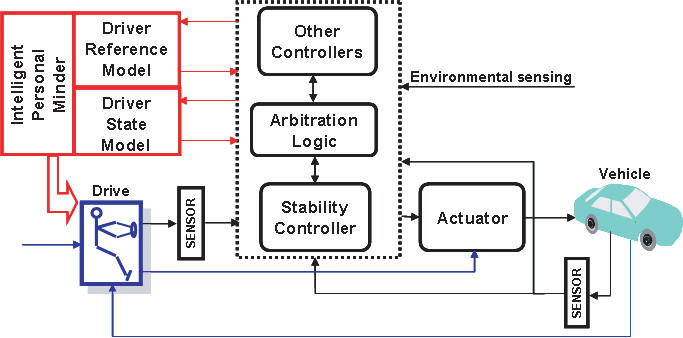
The control framework for the next generation of drive management systems (DMS) for passenger vehicles. By leveraging recent developments in computational neuroscience, adaptive control, gain-scheduling, model predictive control, and situational awareness sensor technologies, we will: (a) learn the driver's habits, driving skills, and comfort driving level; (b) model his/her cognitive state (e.g., attentive or not), and the state of the vehicle (e.g., braking hard) and of the environment (e.g., in a left turn); and (c) adapt the DMS to the particular situation at hand to maximize performance. The DMS will prevent the driver from taking an incorrect action that would violate the safe limits of the vehicle, and also help the driver recover from such unsafe regimes. Our proposed approach borrows well-studied and validated techniques, practices and experiences from the aerospace industry, where "fly-by-wire'' (FBW) and flight management systems (FMS) have increased the safety, reliability, performance, and fuel efficiency of civil and military aircraft over the last three decades.
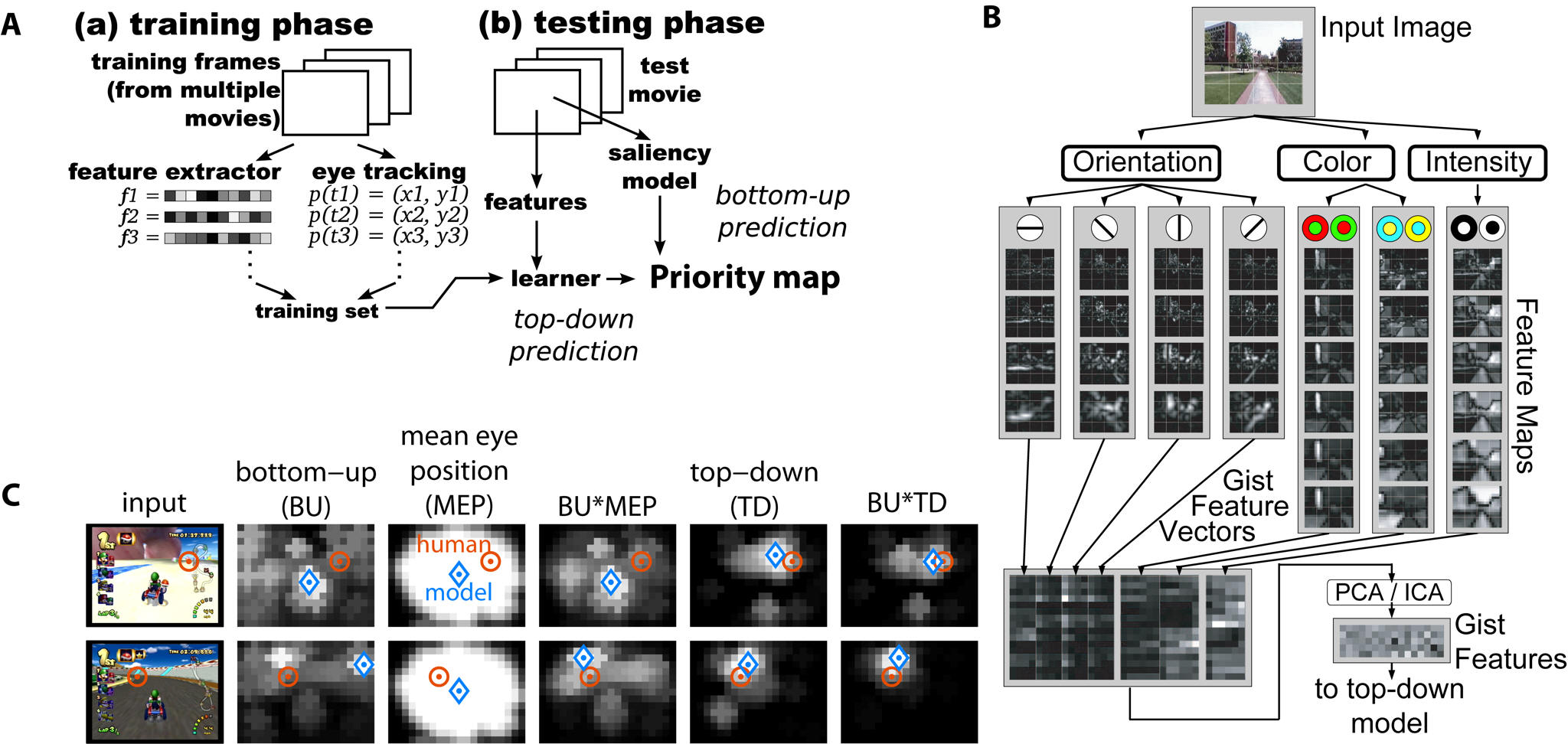
To achieve our stated goal, we propose new methodologies to infer long-term and short-term behavior of drivers in traffic via the use of dynamic Bayesian networks and neuromorphic algorithms that estimate the driver's skills and current state of attention from eye movement data, together with dynamic motion cues obtained from video filming of the driver's view and from steering and pedal inputs. Furthermore, we offer a mathematically rigorous way to infuse this information into the active safety system, to enhance its performance, by taking advantage of recent results from the theory of adaptive, gain-scheduled, and model predictive control via the use of parameter-dependent Lyapunov functions.
Sponsors
This project is supported by NSF.
Collaborators
University of Southern California and Ford Motor Company
Selected Publications
- Tsiotras, P. and Sanz-Diaz R. "Real-Time Near-Optimal Feedback Control of Aggressive Vehicle Maneuvers,'' in Optimization and Optimal Control in Automotive Systems, Eds: H. Waschl, I. Kolmanovky, M. Steinbuch and L. del Re, Springer Lecture Notes in Control and Information Sciences, Vol. 455, 2014, pp. 109-129, doi: 10.1007/978-3-319-05371-4_7
- Chakraborty, I., Sanz-Diaz, R., and Tsiotras, P. "Time-Optimal Vehicle Posture Control to Mitigate Unavoidable Collisions Using Conventional Control Inputs,'' American Control Conference, Washington, DC, June 17-19, 2013, pp. 2165-2170, doi:10.1109/ACC.2013.6580156
- Zafeiropoulos, S., and Tsiotras, P., "Design and Evaluation of a Lane-Tracking Driver Steering Assist System with a Two-Point Visual Driver Model,'' American Control Conference, Portland, OR, June 4-6, 2014, pp. 3911-3917, doi: 10.1109/ACC.2014.6858867