
Advanced Methods for Intelligent Flight Guidance and Planning in Support of Pilot Decision Making
Responsibility for the safe completion of a flight
ultimately rests with the pilot-in-command. Especially during
emergencies, this responsibility can be demanding due to the large
number of tasks to which the pilot must attend, including: detecting
and resolving failures in aircraft systems; continuing to monitor
aircraft system health; coordinating with cabin crew, airline
dispatchers and air traffic control; controlling the aircraft; and
planning (and then following) a trajectory that will result in a
safe landing. This inherent difficulty is compounded by a
significant number of stressors, including physical danger, an
uncomfortable physical environment (heat, smoke, noise, etc.), an
overwhelming amount of information to consider, and the need to make
decisions in a short period of time. In addition, the aircraft may
have degraded performance and handling qualities, limiting the
extent to which the pilot’s past experience is relevant to the
present problem. The aim of this project is to develop an
intelligent system that would be able to assist/advise the pilot for
the correct action to land the airplane safely in case of an
on-board emergency. In contrast to current "strategic" planners (eg
FMS) that use a low-fidelity model of the airplane and merely
provide waypoint and altitude crossings, our ultimate goal is to
provide an emergency generation architecture that will blend
smoothly and seamlessly short-term actions with long-term
oprimization objectives.

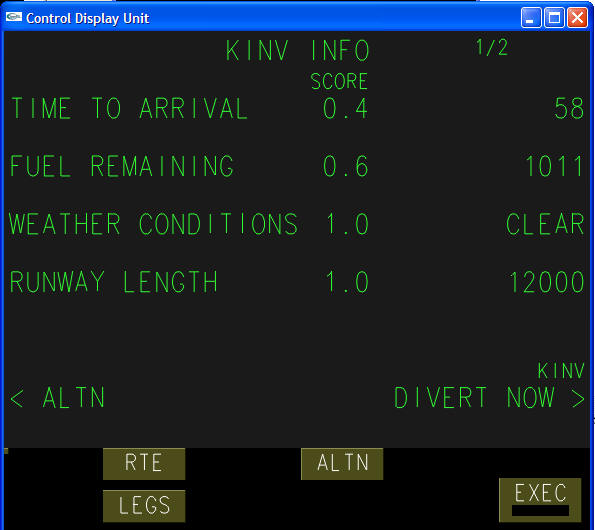
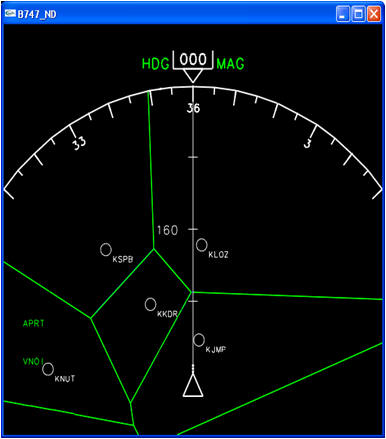
The proposed APA interface is based on a traditional (B-777) FMS
system, with the addition of buttons that allow the pilot to
(down)select the list of available airport to land. The list of the
most promising airports is computed on-line by a trajectory
optimization solver. For robustness, the initial screening uses an
extension of the Dubins path problem in the three-dimensional space.
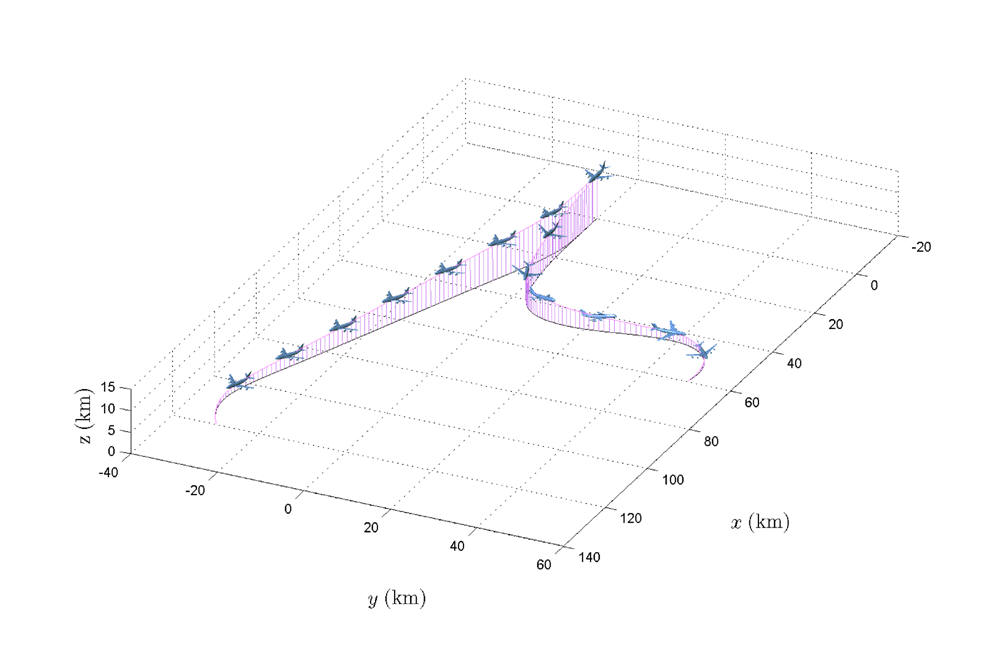
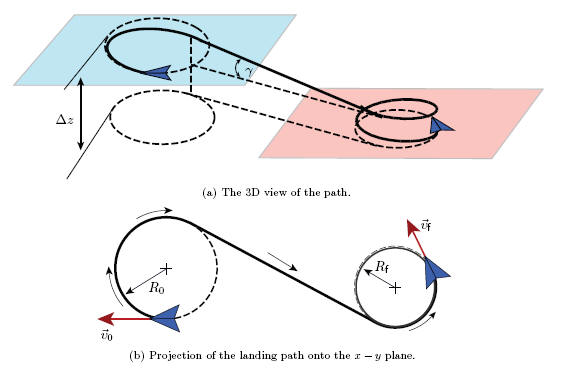
The approach consists of the following tasks: First, we introduce a geometric framework for the generation of length-suboptimal, curvature-constrained, three-dimensional curves, which satisfy the following requirements: 1) the projection of the curve on the horizontal plane corresponds to a Dubins-like path, and 2) an aircraft traveling along this curve is descending continuously until it reaches its final destination. Subsequently, we assign a speed profile along the path that captures succinctly the motion constraints of the aircraft, thus inducing a time-parameterization of the geometric path. After this time parameterization is attached to the path, the time histories of the control inputs required so that the aircraft can traverse the geometric path with the assigned speed profile are computed through inverse dynamics. The resulting time-parameterized path (along with the control input time histories) can be fed as an initial guess into a numerical optimal control solver, such as DENMRA.
Sponsors
This project is funded by NASA.
Selected Publications
- Jain, S. and Tsiotras, P., "Multiresolution-Based Direct Trajectory Optimization,'' AIAA Journal of Guidance Control, and Dynamics,
Vol. 31, No. 5, pp. 1424-1436, 2008
- Zhao, Y. and Tsiotras, P., "Mesh Refinement for Solving Optimal Control Problems Using Grid Density Functions," AIAA Journal of Guidance, Control, and Dynamics, Vol. 34, No. 1, pp. 271-277, 2010, doi: 10.2514/1.45852.
- Cowlagi, R. and Tsiotras, P., "Shortest Distance Problems in Graphs Using History-Dependent Transition Costs with Application to Kinodynamic Path Planning,'' American Control Conference, St. Louis, MO, June 10-12, 2009, (best student paper award),
pp. 414-419.
- Bakolas, E., and Tsiotras, P., "Multiresolution Path Planning Via Sector Decompositions Compatible to On-Board Sensor Data,'' AIAA Guidance, Navigation, and Control Conference, Honolulu, HI, Aug. 18-21, 2008, AIAA Paper 2008-7238.
- Bakolas, E. and Tsiotras, P., "Minimum-Time Paths for a Light Aircraft in the Presence of Regionally-Varying Strong Winds,'' Infotech at Aerospace, Atlanta, GA, April 20-22, 2010
- Zhao, Y. and Tsiotras, P., "A Density-Function Based Mesh Refinement Algorithm for Solving Optimal Control Problems,'' Infotech at Aerospace Conference, Seattle, WA, April 6-9, 2009, AIAA Paper 2009-2019 (invited).
- Bakolas, E. and Tsiotras, P., "On the Generation of Nearly Optimal, Planar Paths of Bounded Curvature and Curvature Gradient,'' American Control Conference, St. Louis, MO, June 10-12, 2009, pp. 385-390
- Zhao, Y. and Tsiotras, P., "Time-Optimal Parameterization of Geometric Path for Fixed-Wing Aircraft,'' Infotech at Aerospace, Atlanta, GA, April 20-22, 2010.
- Cowlagi, R. and Tsiotras, P., "Kinematic Feasibility Guarantees in Geometric Path Planning using History-based Transition Costs over Cell Decompositions,'' American Control Conference, Baltimore, MD, June 30-July 2, 2010.
- Cowlagi, R., and Tsiotras, P., "Multi-resolution Path Planning: Theoretical Analysis, Efficient Implementation, and Extensions to Dynamic Environments,'' 49th IEEE Conference on Decision and Control, Atlanta, GA, Dec. 15-17, 2010, pp. 1384-1390.
- Zhao, Y. and Tsiotras, P., "A Quadratic Programming Approach to Path Smoothing,'' American Control Conference, San Francisco, CA, June 29-July 1, 2011, pp. 5324-5329.
- Bakolas, E., Zhao, Y. and Tsiotras, P., "Initial Guess Generation for Aircraft Landing Trajectory Optimization,'' AIAA Guidance, Navigation, and Control Conference, Portland, OR, Aug. 8-11, 2011, AIAA Paper 2011-6689.